-
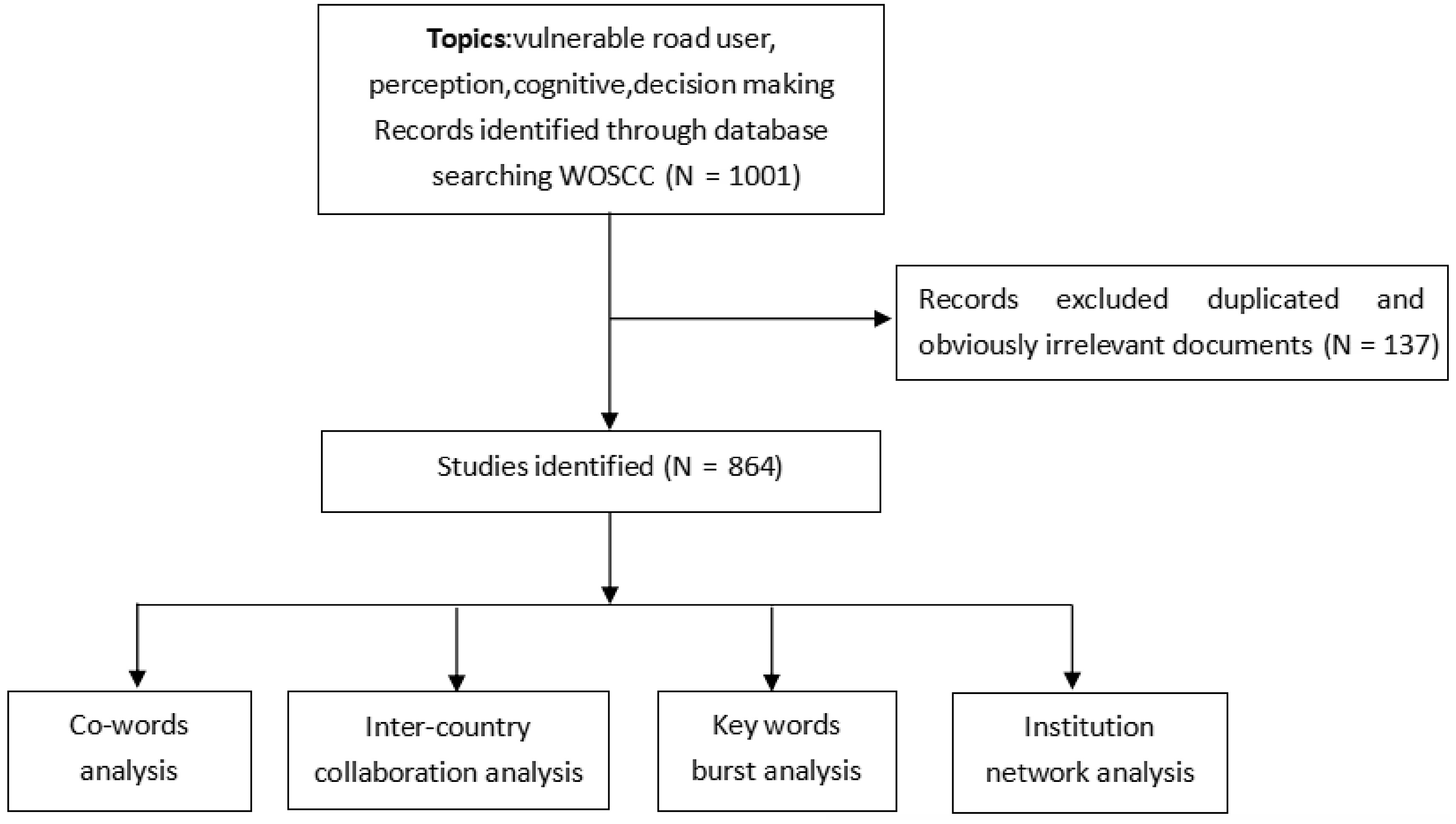
Figure 1.
Workflow diagram of research.
-
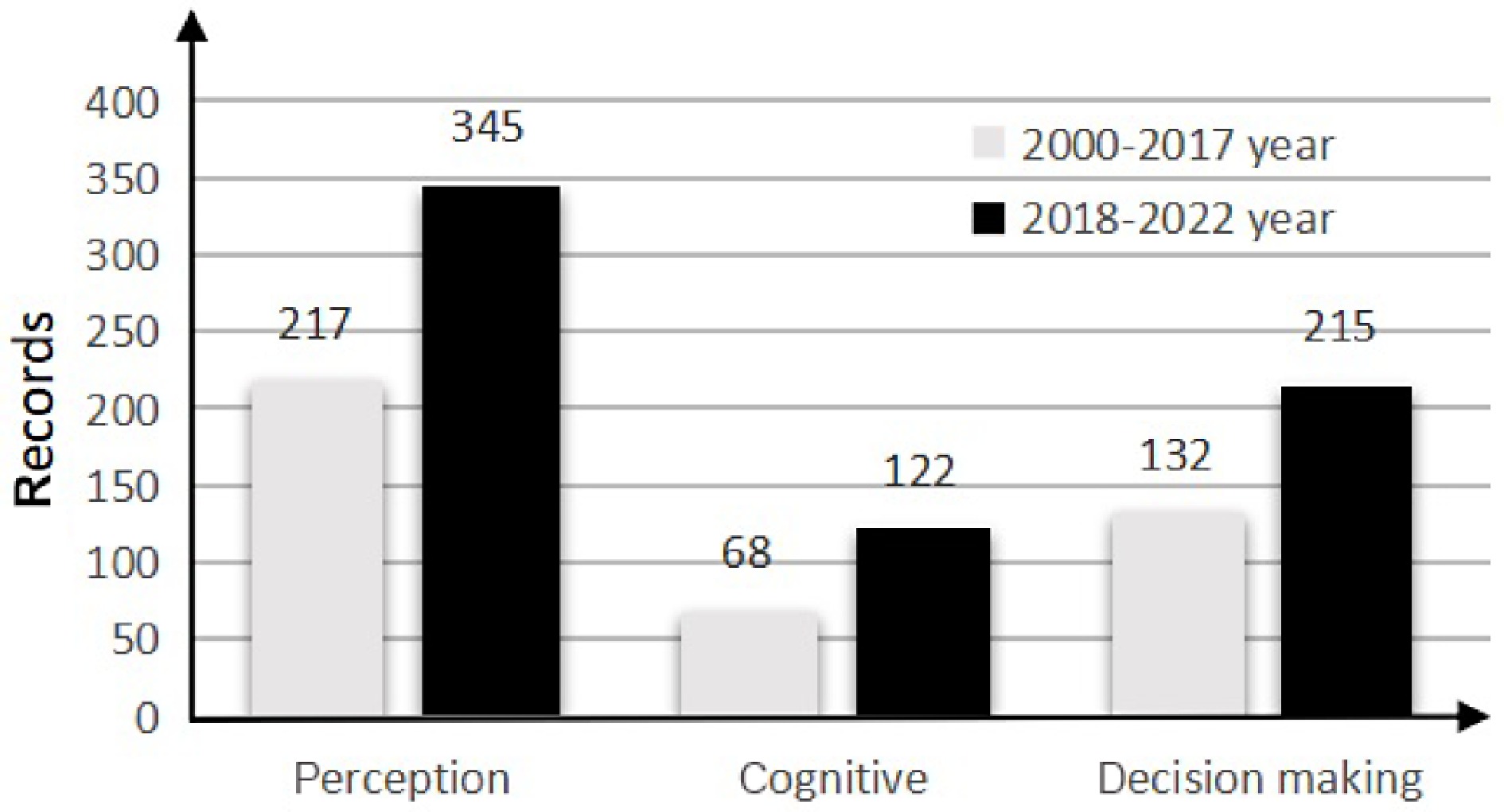
Figure 2.
Comparisons of number of research articles.
-
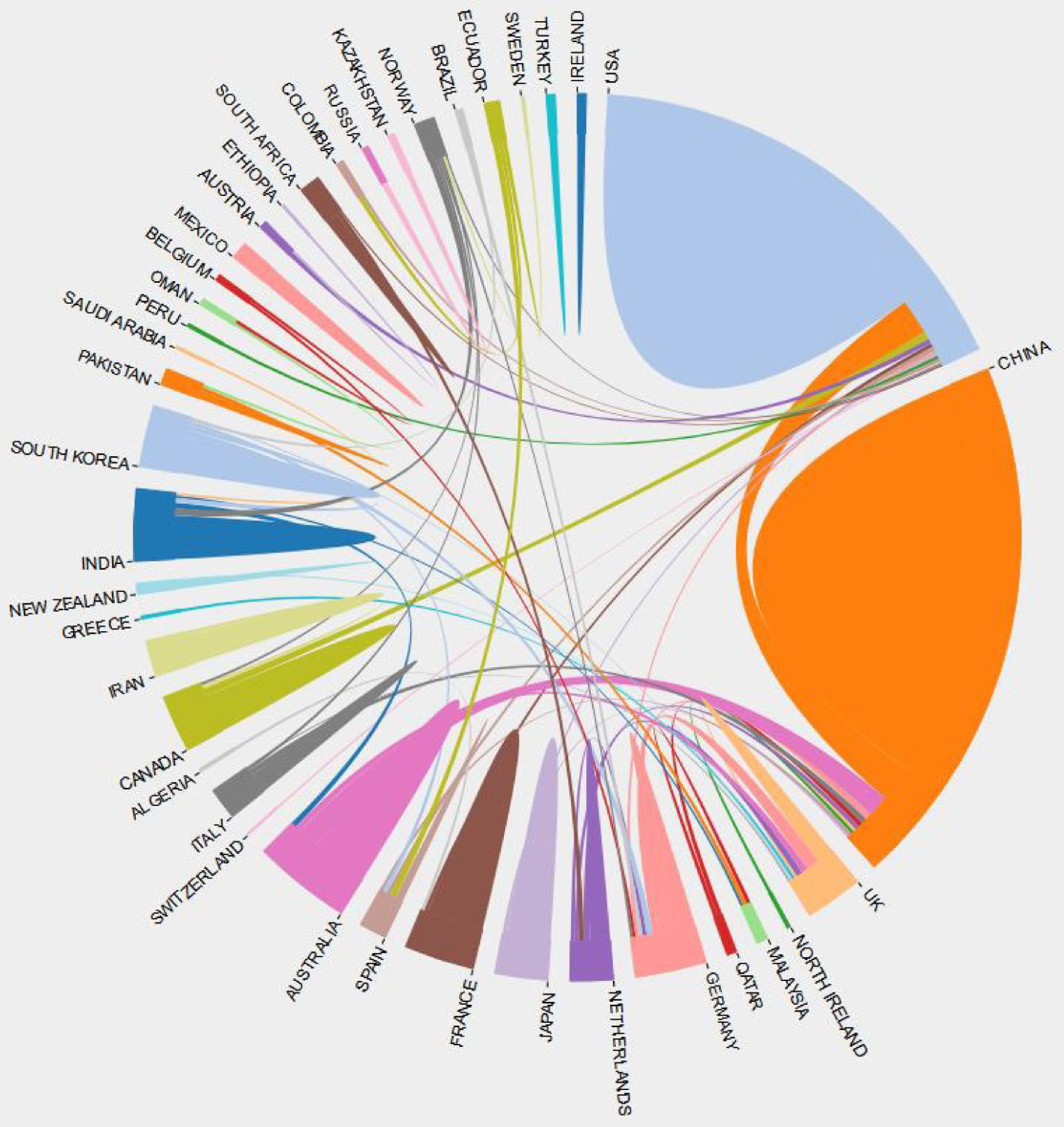
Figure 3.
Inter-country collaboration network map.
-
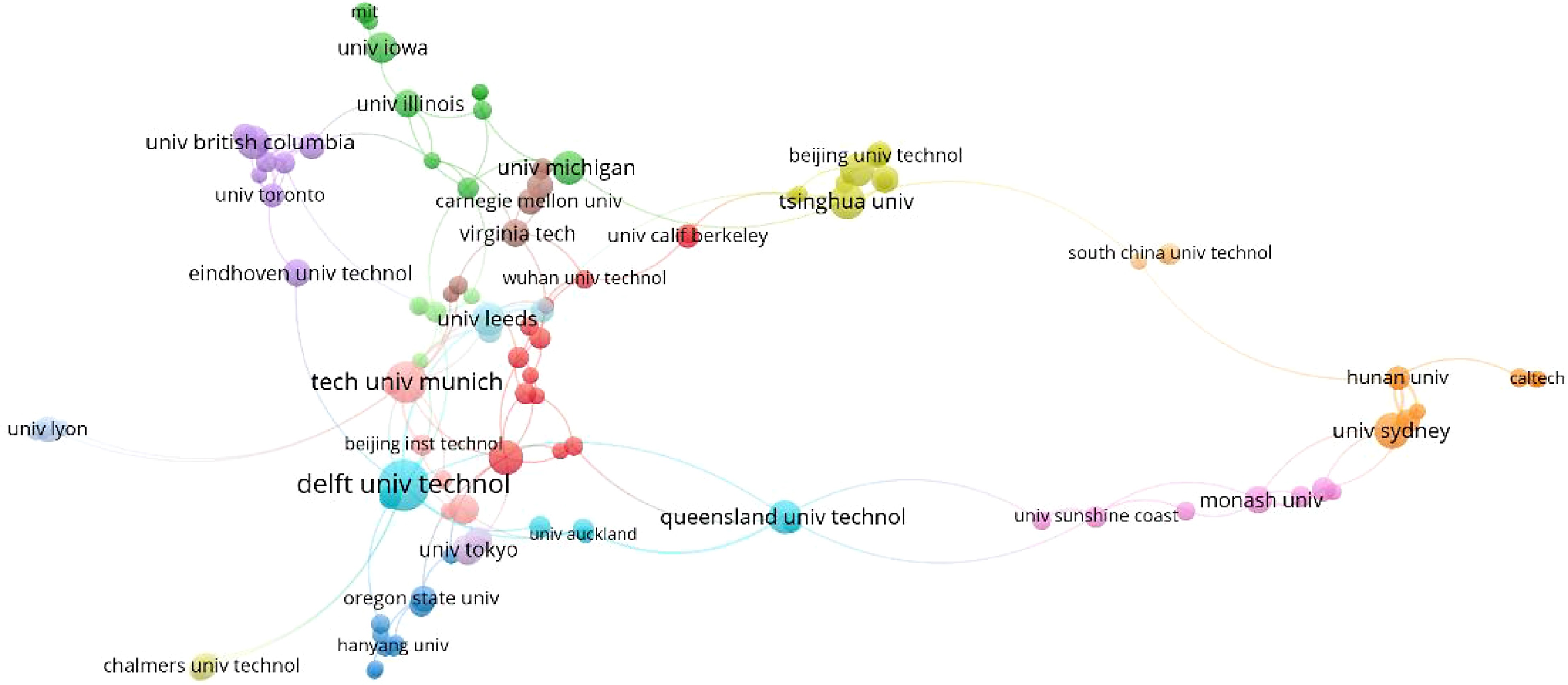
Figure 4.
Cooperation network among research institutions.
-
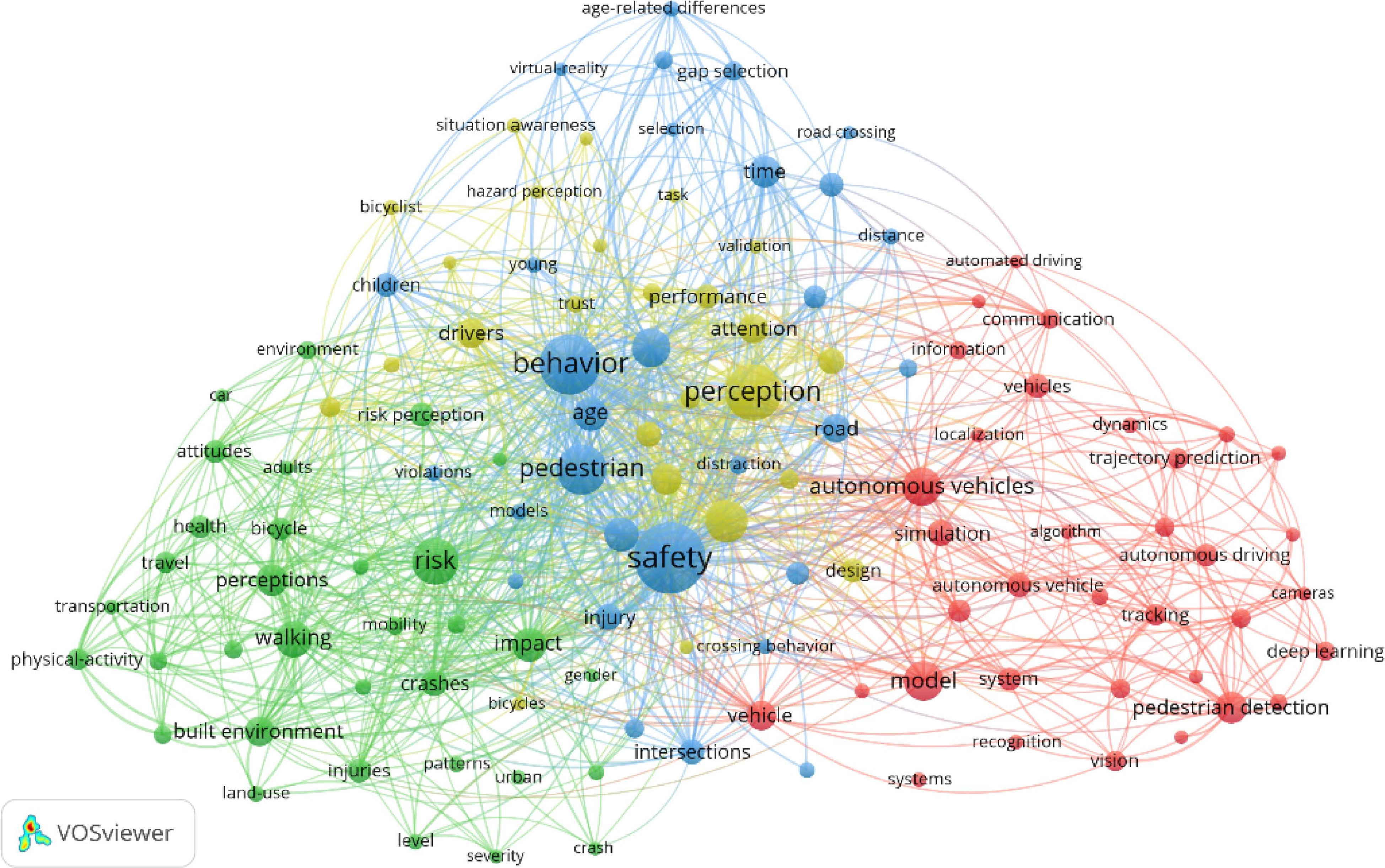
Figure 5.
Document keyword co-occurrence of smart car perception-cognition-decision documents.
-
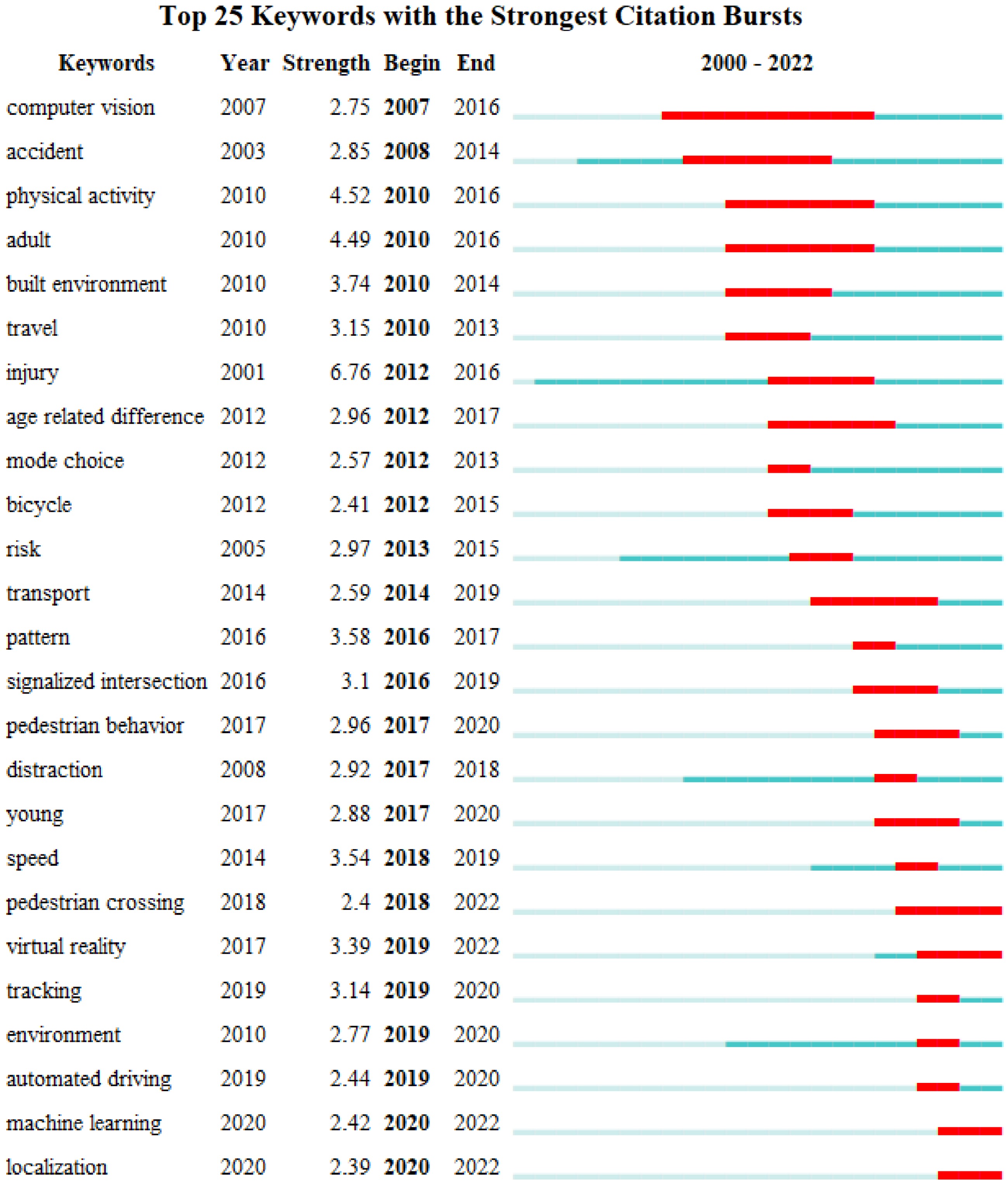
Figure 6.
VRU keyword burstness analysis.
-
Classification List of research content The traditional detection research on pedestrian and cyclist (pedestrian
detection algorithms)Based on traditional manual features:
Histogram of Orientated Gradients (HOG) pedestrian detection algorithm, Support Vector Machine (SVM) method, Deformable Part Model (DPM) and pedestrian detection based on action features.Detection algorithm based on deep learning:
1. Detection algorithm based on target candidate frame: Faster Regions with Convolutional Neural Network (Faster R-CNN) algorithm, SPPNet, Fast R-CNN and methods represented by Faster R-CNN based on candidate box.
2. Detection algorithm based on integrated convolutional network: You Only Look Once (YOLO) and Single Shot MultiBox Detector (SSD)The joint detection technology 1. Detection method based on SVM classifier for a monocular vision system and HOG-LP (Histogram of Oriented Gradient-Light sampling and Pyramid sampling) method.
2. Deformable Part Model (DPM) multi view pedestrian detection model.
3. Multi-level cyclist and background classification method based on the Extreme Learning Machine (ELM)
4. Cascade classifier of multi view model.
5. Bicycle riding behavior recognition model based on Convolutional Neural Network (CNN)Universal object detection system 1. Deep neural network AlexNet in a large-scale visual recognition challenge.
2. The general target detector based on Faster R-CNN trained by using the focus loss function.
3. Pedestrian detection network PVDNet based on deep learning.
4. Relevant filtering framework based on background perception.
5. Pedestrian recognition algorithm based on KDTree and European clustering for the laser radar point cloud data combined with the geometric and physical characteristics of pedestrians.Table 1.
Summary of perception research.
-
Classification List of research content Behavior prediction Micro models: Benefit Cost Cellular Model and Magnetic Force Model Individual behavior models: Markov chain model, fuzzy logic model and support vector machine. Trajectory prediction Short-term prediction
1. First-order nonlinear pedestrian motion model based on Gaussian Process Dynamic Models (GPDMs)
2. The nuclear density estimation method used to identify the black spots of VRU accidents and multiple logistic regression model.
3. Gaussian process dynamic model and pedestrian dynamic characteristics obtained through machine learning.
4. Combination of the Dynamic Bayesian Network and the Switching Linear Dynamic System (SLDS).
5. Assumptions of constant acceleration and yaw rate.Long-term prediction:
1. Method on converting the motion prediction problem into a planning problem on the basis of motion target estimation.
2. Method on including the target into the variable range and gave the update equation of the target.
3. Pedestrian risk dynamic assessment model.
4. Model the pedestrian intention distribution based on the Partially Observable Markov Decision Process.
5. Theory of man machine environment coupling.
6. Information interaction by using VRU mobile phone communication equipment to position VRU and predict long-term motion trajectory.Table 2.
Summary of VRU motion prediction.
-
Classification List of research content Conflict parameter model based on kinematics Safe time model: Quantitative assessment of collision risk based on such parameters as Time to collision (TTC), Post encroachment time (PET), Time advantage (TAdv), and Time difference of conflict (TDTC). Safe distance model: Berkeley model and Mazda model. Artificial potential field model based
on field theory1. Study on the pedestrian collision risk at the blind area of vehicles at the intersection.
2. Spring model to study the collision risk between vehicles and pedestrians.
3. Path tracking strategy based on nonlinear model predictive control (NMPC) and adopted artificial potential field (APF).
4. A framework for early warning system combined with Bayesian statistical methods.Table 3.
Summary of risk decision making research.
-
Classification List of research content Decision-making methods based on
driver status monitoringRisk identification method based on the driver's behavior:
dangerous working condition identification scheme based on RBF neural network.Decision-making methods based on
driving responseNon cooperative active safety decision-making method. Cooperative active safety decision-making method:
1. Layered pedestrian collision avoidance strategy based on upper fuzzy control and lower PID control.
2. Layered pedestrian collision avoidance strategy extracted some features of VRU, driver and vehicle road environment to assist decision-making through smart phone sensors.
3. Vehicle driving controller based on pedestrian collision avoidance in CVIS environment and the basic principle of speed obstacle method.
4. Exchanging mobile information between vehicles and VRU entities through wireless communication.Table 4.
Summary of the active safety decision-making methods for VRU protection.
Figures
(6)
Tables
(4)