-
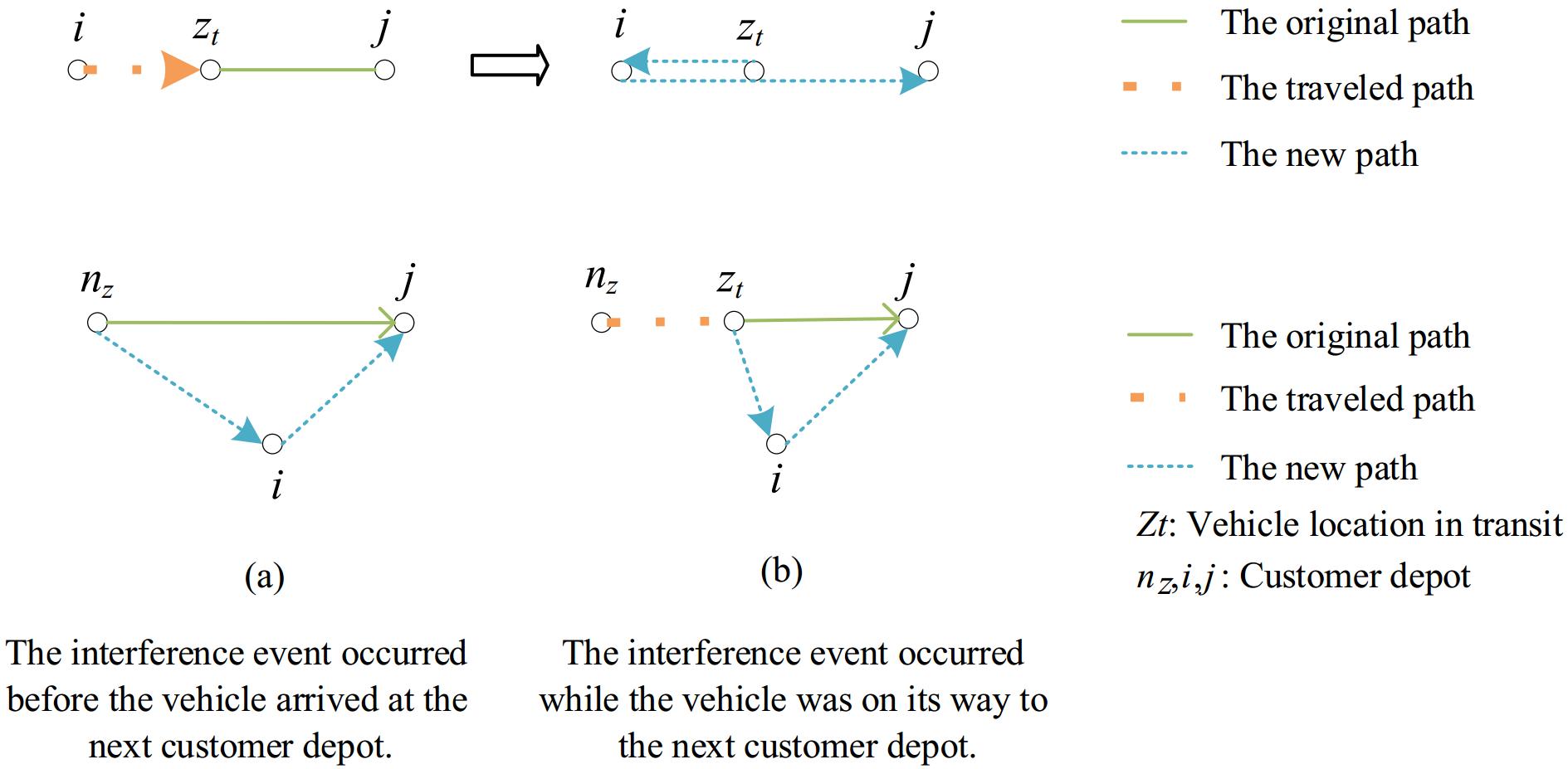
Figure 1.
Diagram of deviation in transportation vehicle routes.
-
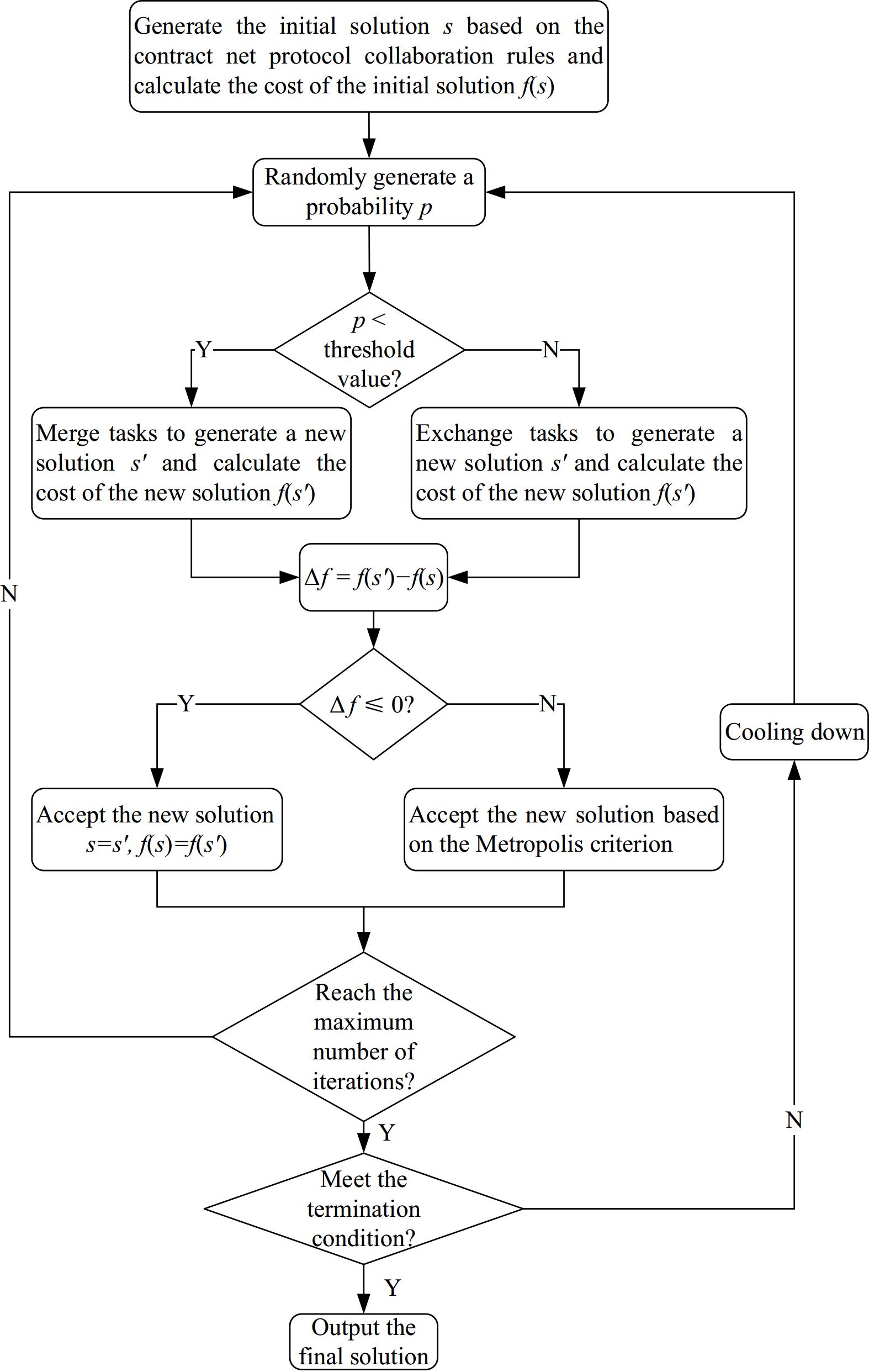
Figure 2.
Flowchart of the algorithm.
-
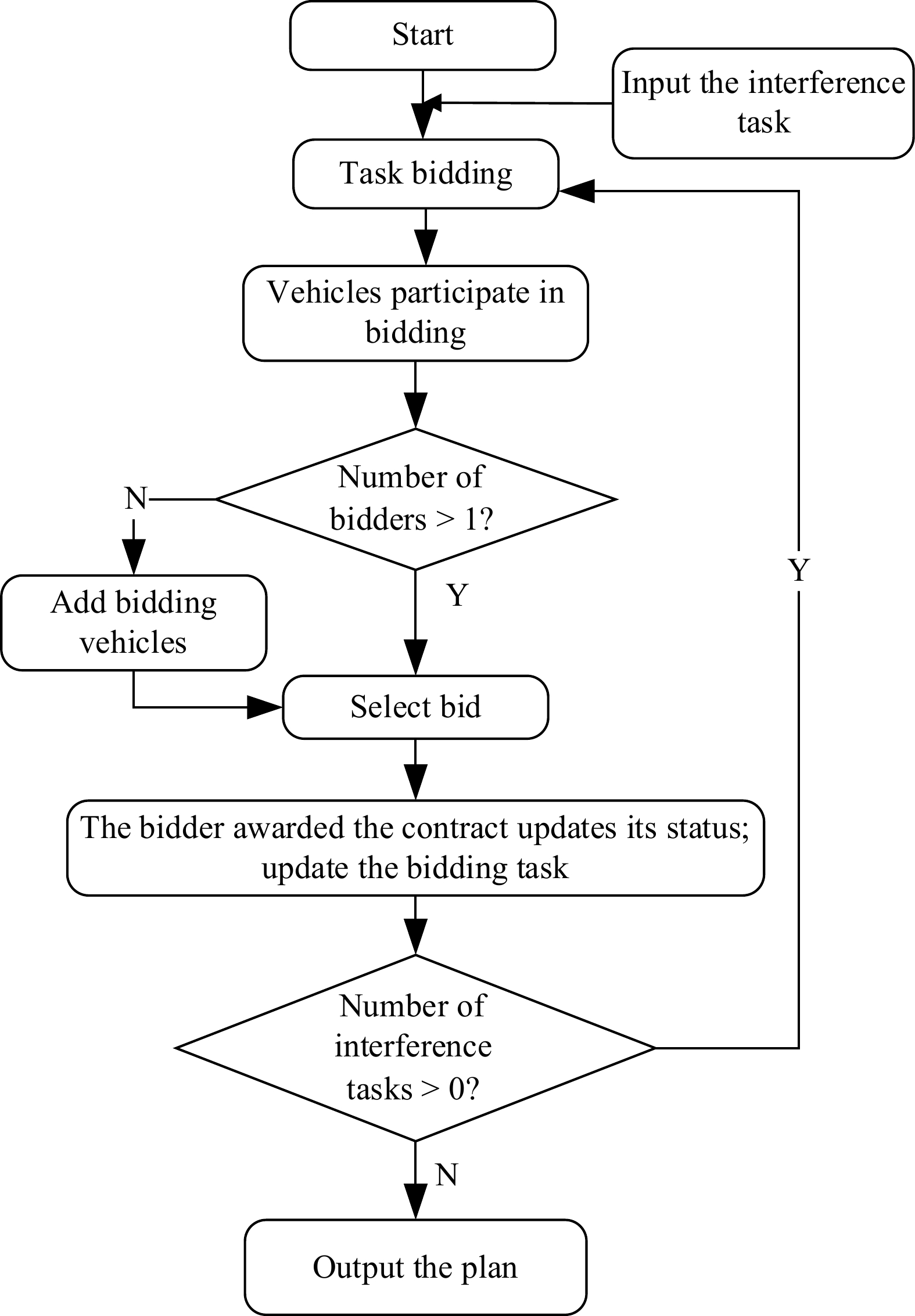
Figure 3.
Formation of the initial plan based on the contract net algorithm.
-
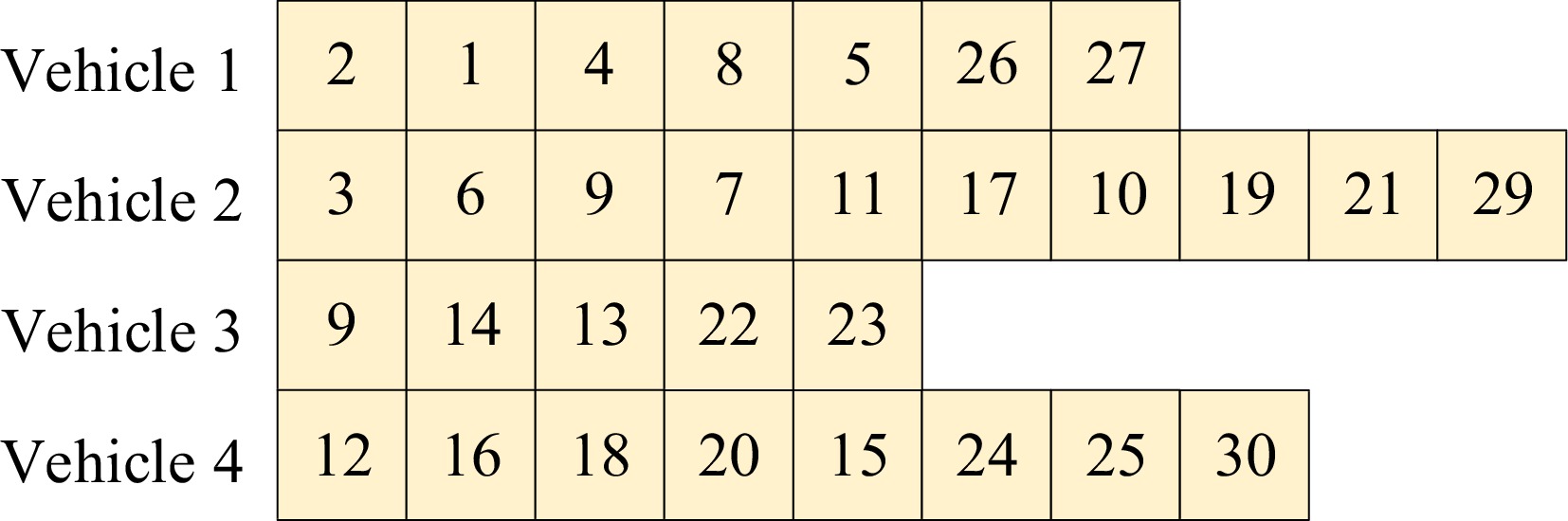
Figure 4.
Encoding form of the solution.
-

Figure 5.
Merging tasks.
-

Figure 6.
Swap tasks.
-
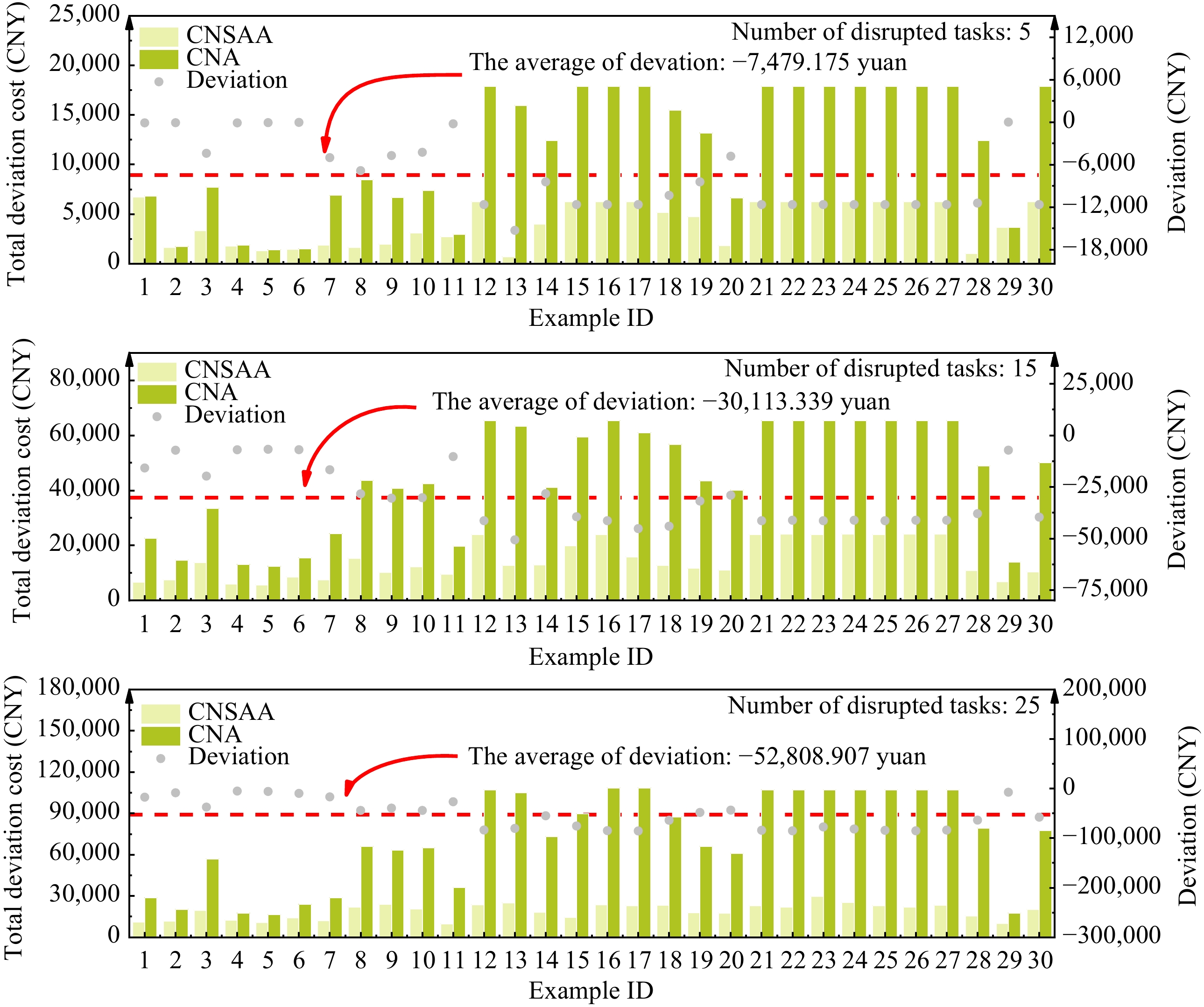
Figure 7.
The total deviation cost in the C road network. Deviation = The total deviation cost of CNSAA − The total deviation cost of CNA.
-
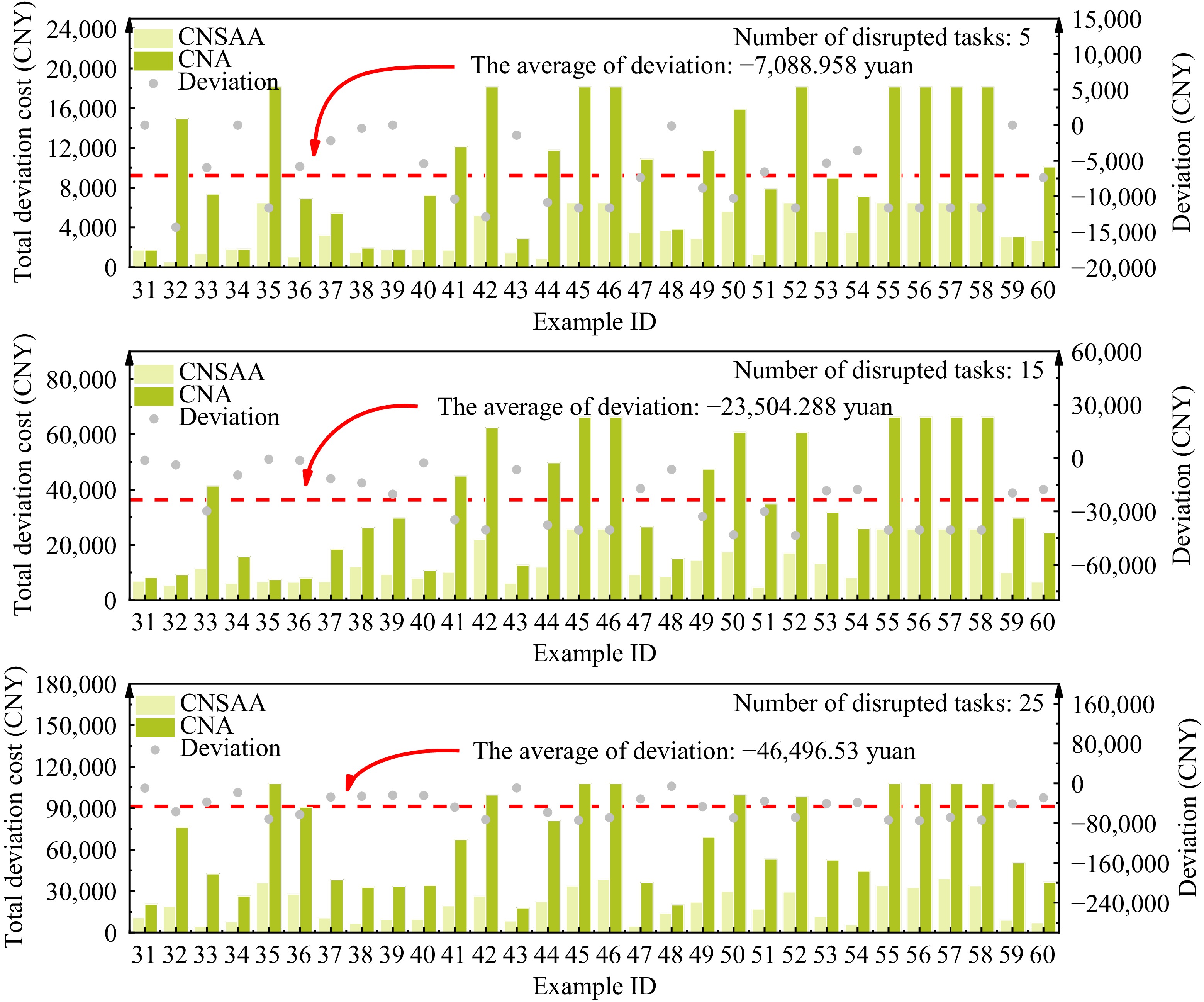
Figure 8.
The total deviation cost in the R road network. Deviation = The total deviation cost of CNSAA − The total deviation cost of CNA.
-
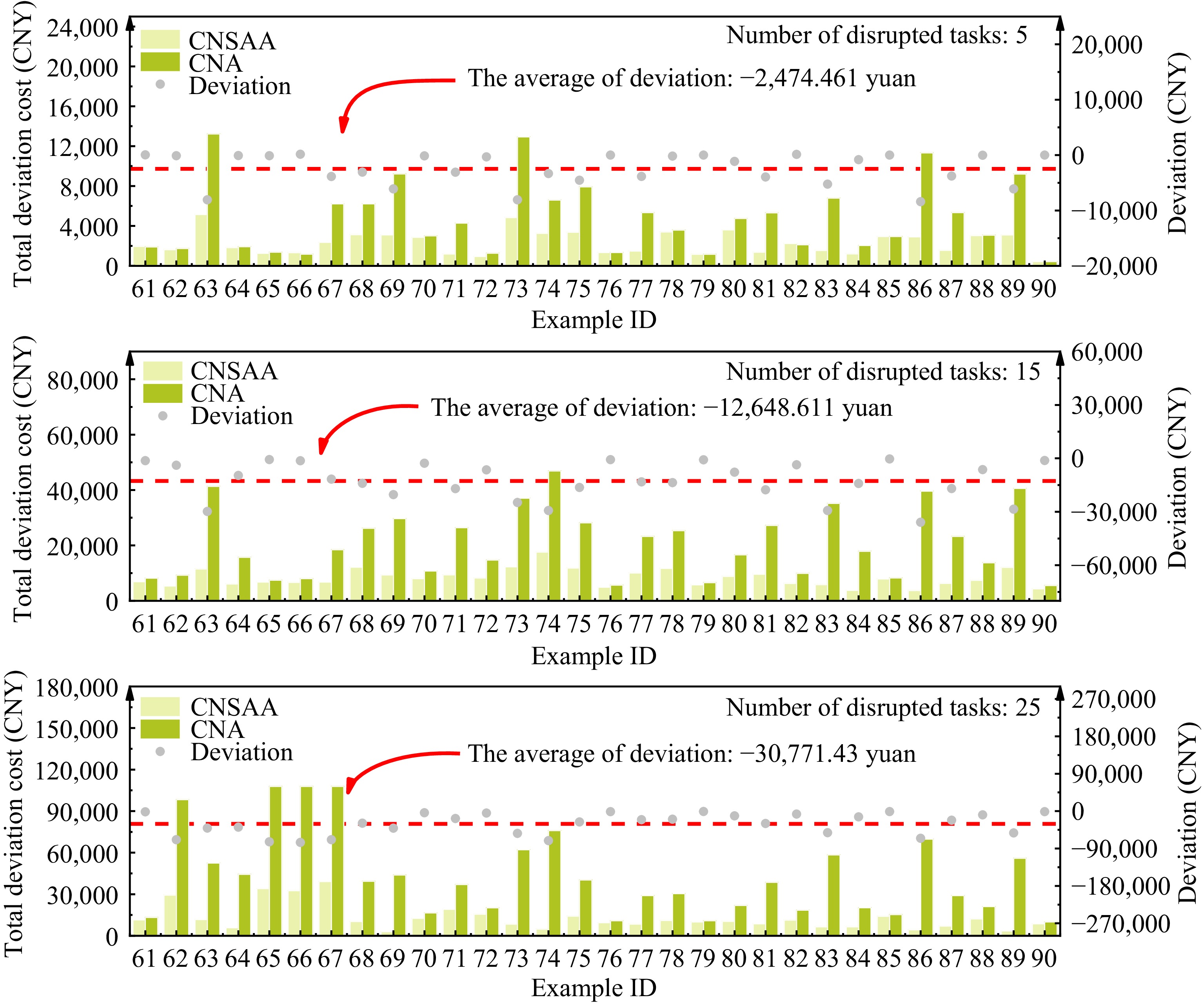
Figure 9.
The total deviation cost in the RC road network. Deviation = The total deviation cost of CNSAA − The total deviation cost of CAN
-
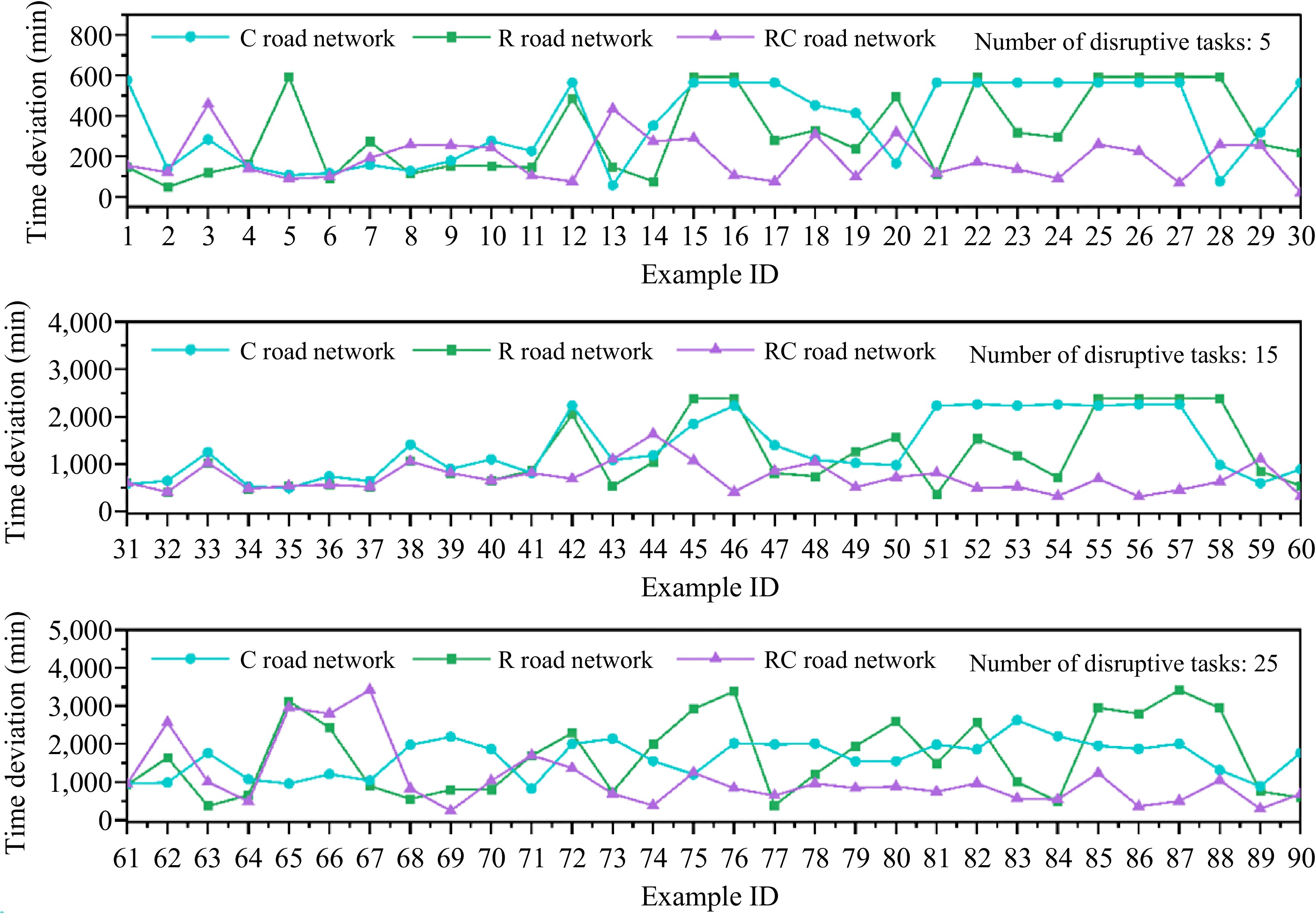
Figure 10.
Time deviation in the three types of road networks.
-
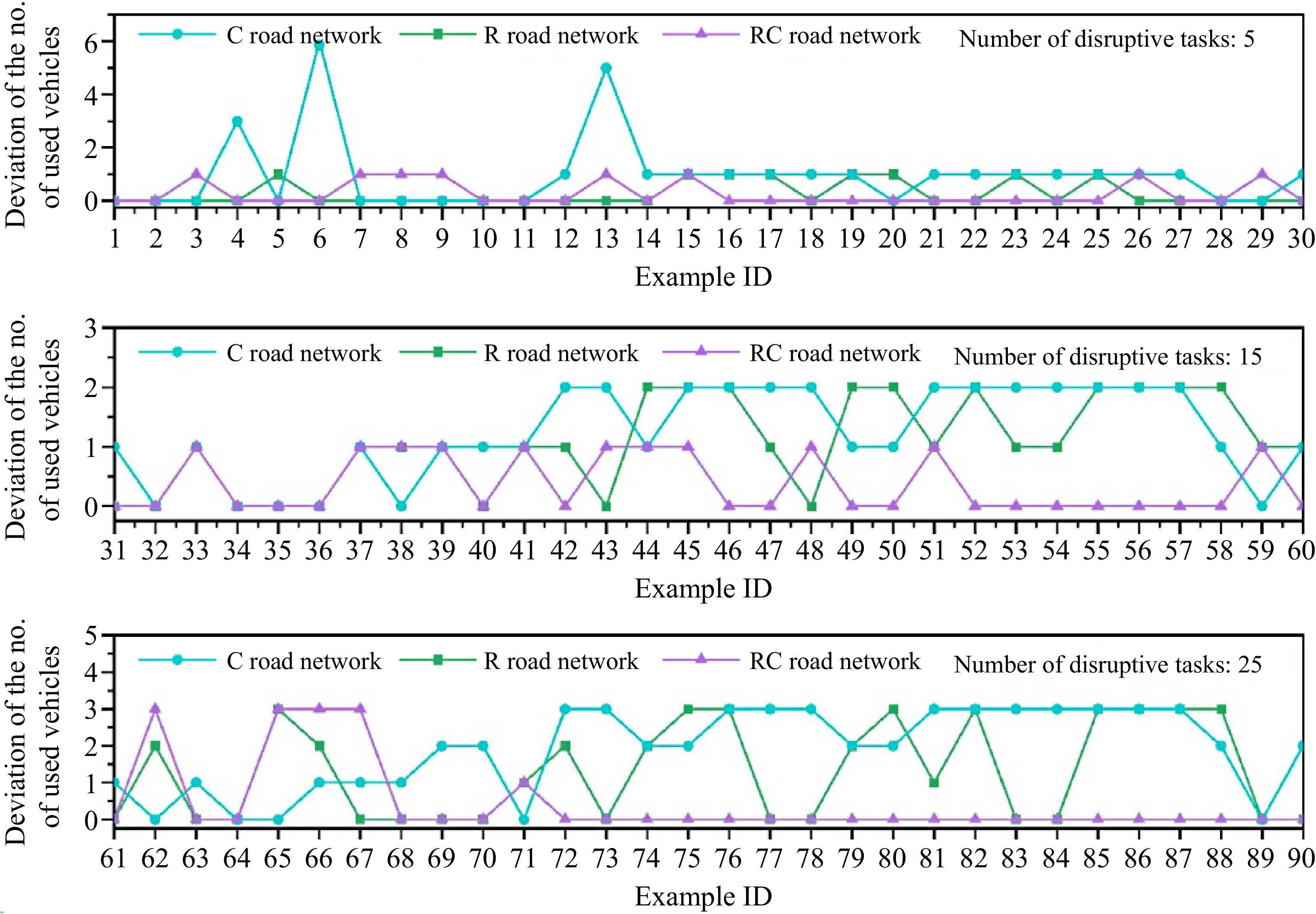
Figure 11.
Deviation in fixed vehicle count under the three types of road networks.
-
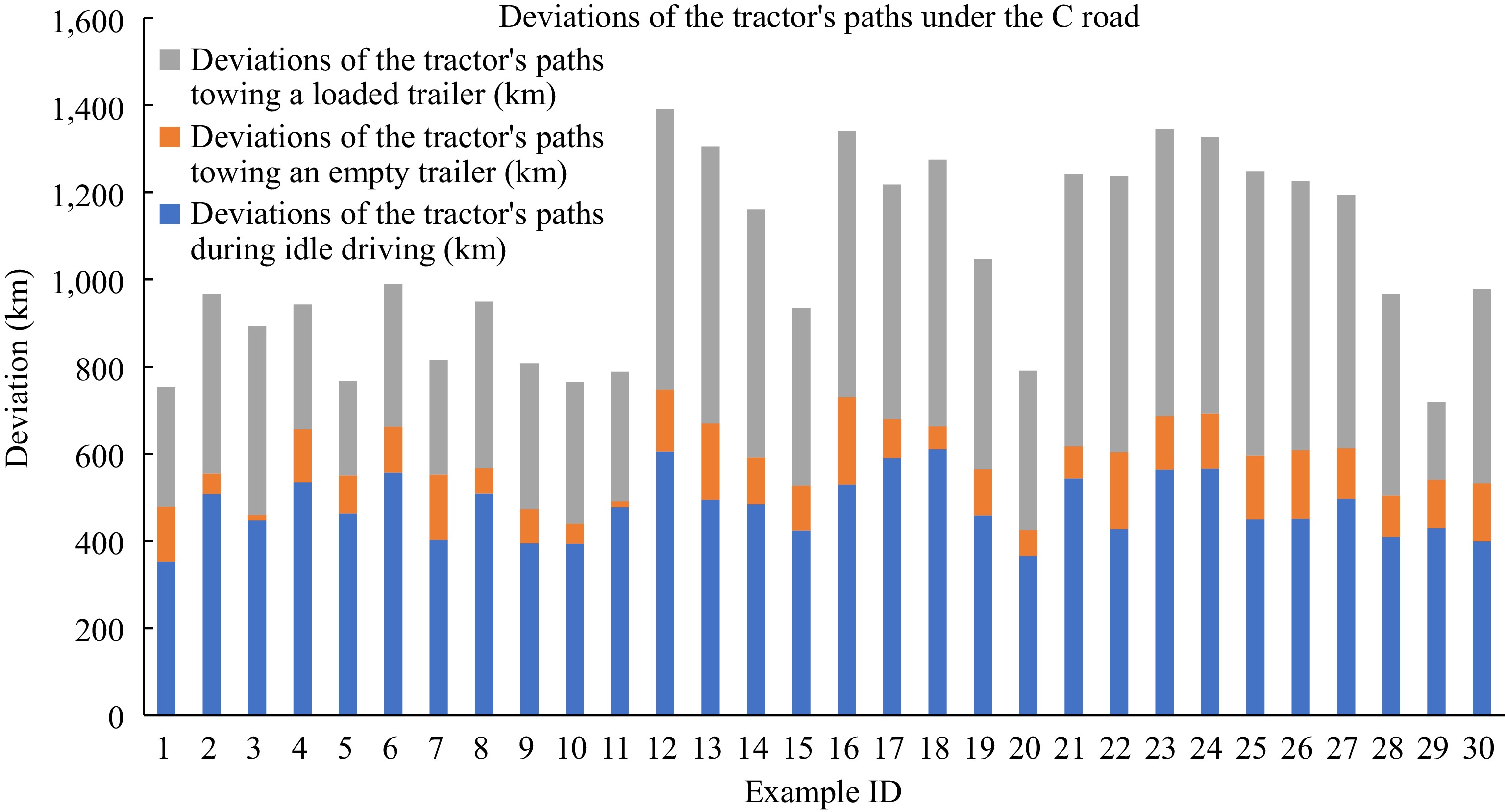
Figure 12.
Deviations of the tractor’s paths under the C road network.
-
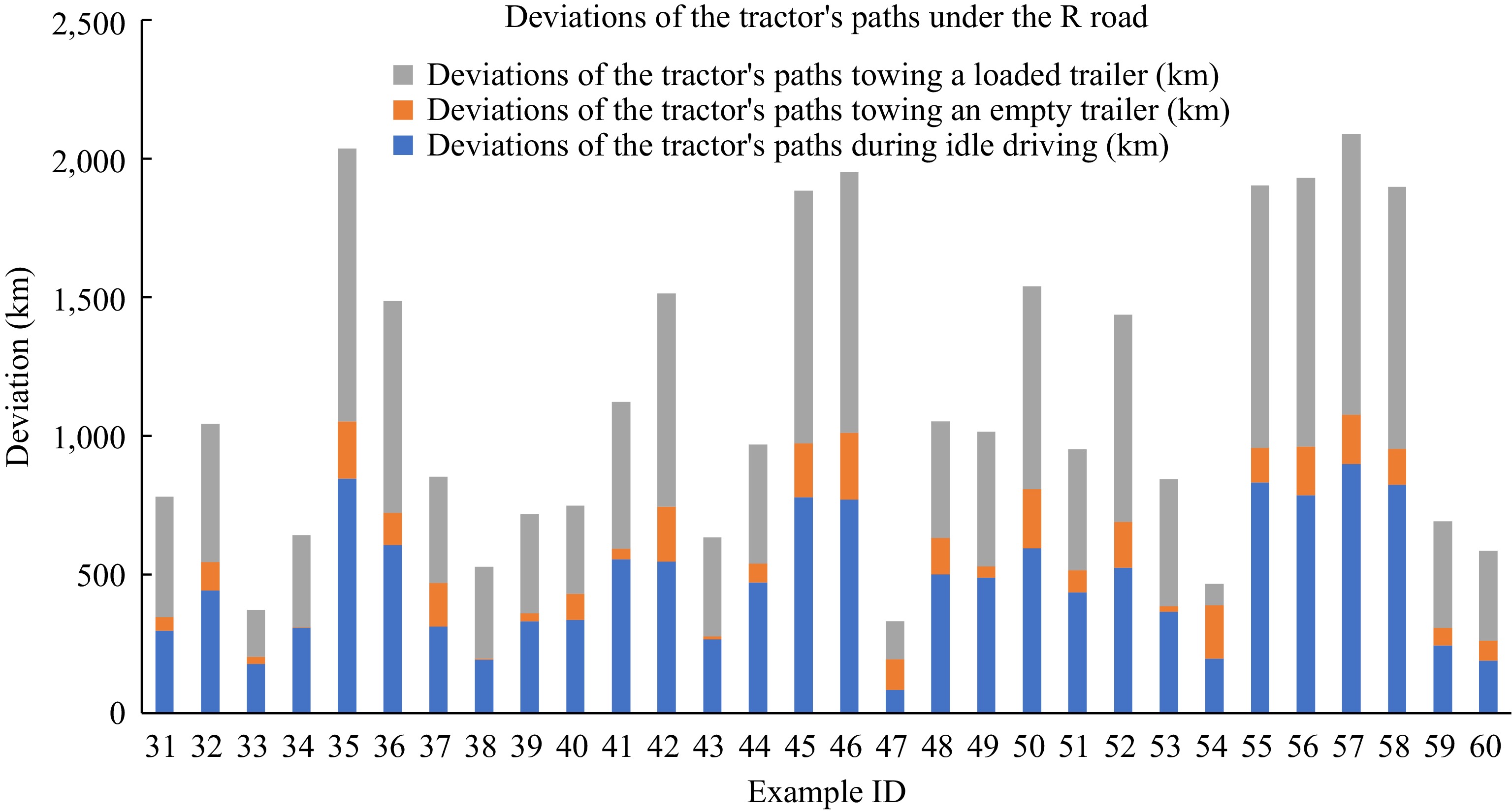
Figure 13.
Deviations of the tractor’s paths under the R road network.
-
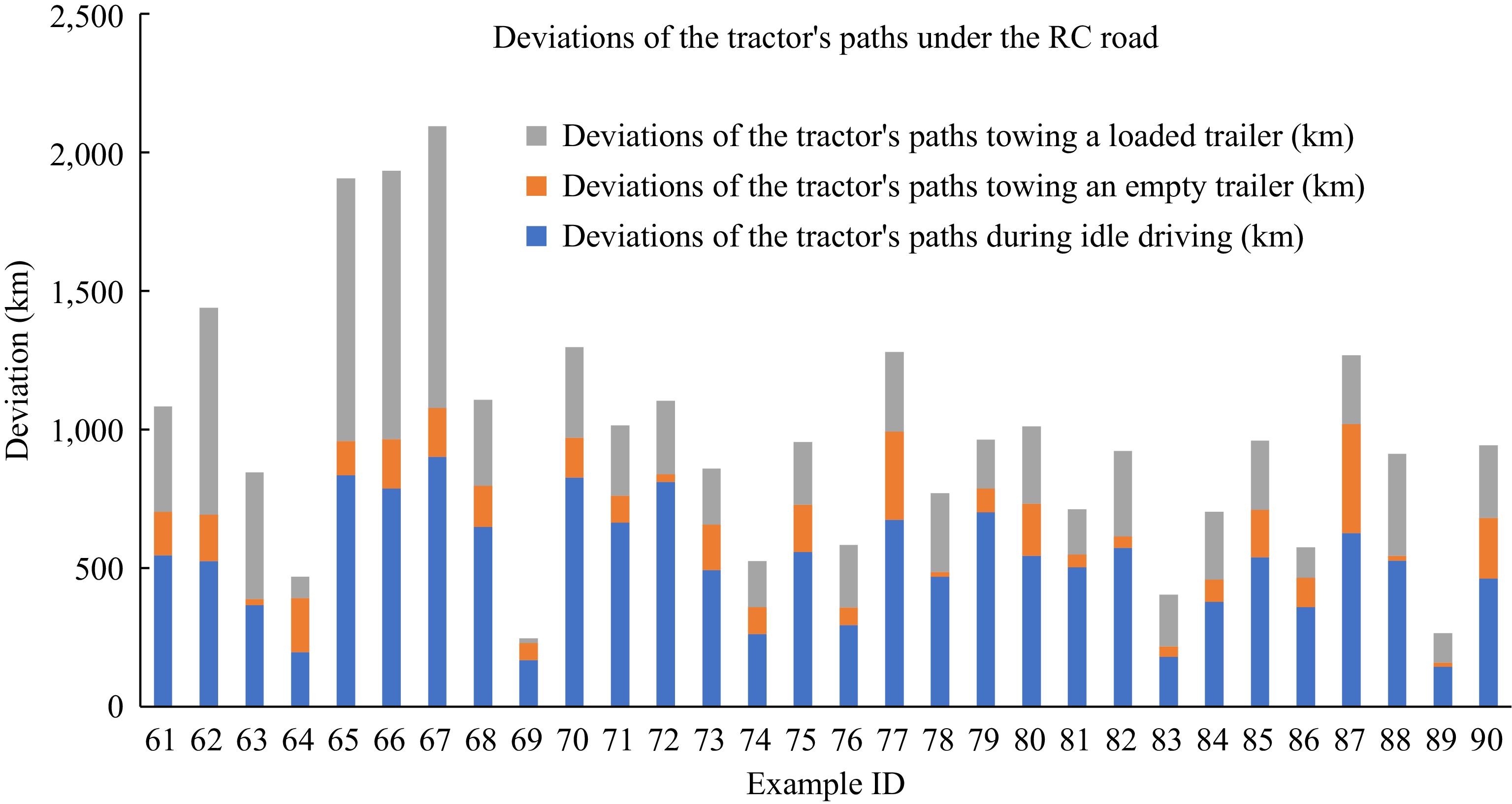
Figure 14.
Deviations of the tractor’s paths under the RC road network.
-
Parameters Meanings Parameters Meanings K Set of transportation vehicles, K = {1, 2, k, ..., K}, K = K* $ \cup $ M Set of tasks, M = {1, 2, m, ..., M}, M = M* $ \cup $ K* Set of vehicles currently in transit, K* = {1, 2, 3, k*, ..., K*} M* Set of newly added disruptive task set, M* = {1, 2, m*, ..., M*} K' Set of remaining vehicles, K' = {1, 2, k', ..., K'} M' Set of original tasks, M' = {1, 2, m', ..., M'} N Set of transportation nodes, N = {1, 2, n, ..., N}, N = C $ \cup $ M" Set of unfinished transportation tasks at the time of the disruption occurrence, M" = {1, 2, m", ..., M"} S Set of trailer-swapping centers, S = {1, 2, s, ..., S} tijk The time taken by tractor k to travel from customer point i to customer point j n" Node that is currently being serviced after the occurrence of the disturbance. C Set of customer points, C = {1, 2, c, ..., C} nz Current location of the vehicle in transit Table 1.
Parameters and meanings of nodes and related tasks.
-
Parameters Meanings Parameters Meanings V Speed of the vehicle C2 Path deviation cost of the tractor towing a loaded trailer t The time of the occurrence of the disturbance C3 Path deviation cost of the tractor towing an empty trailer p The number of vehicles already in use C4 The cost of path deviation for a tractor driving in an empty state p' The number of remaining vehicles in the depot C5 The cost of time deviation for a task e Status of the tractor, e = {e1, e2, e3} C6 Penalty cost for abandoning a task by a tractor e1 Status of the tractor towing an empty trailer c1 Fixed cost coefficient for vehicles e2 Status of the tractor towing a loaded trailer Gk The rated carrying capacity of the tractor e3 Status of the tractor with idle driving Wk The weight of an empty trailer cz The cost per unit of tractor driving in different statuses (in CNY), cz = {c2, c3, c4} Wm The weight of task m c2 Driving cost of the tractor towing an empty trailer α Coefficient of early arrival penalty c3 Driving cost of the tractor towing a loaded trailer $\phi $ Coefficient of task time deviation penalty c4 Driving cost of the tractor when it is idle driving γ The cost coefficient for abandoning a task p* The newly dispatched vehicle tmk The original start time of the task f0 The transportation cost coefficient $t'_{mk}$ The new start time of the task $ {{t}_{{{m}_{d}}{{m}_{o}}{k}}} $ The time taken by tractor k to travel from the starting point to the ending point of task m d2k Remaining mileage of tractor k with an empty trailer ${t_{m^{\text{k,e}}}}$ The start time of tractor k to perform task m d3k The remaining mileage of tractor k with a loaded trailer ${t_{m^{\text{k,}}l}}$ The end time of tractor k to perform task m d4k The remaining mileage of tractor k when driving empty C Total cost ETm The required start time for task m C1 The deviation cost of the used vehicles LTm The required end time for task m Table 2.
Parameters and meanings of dumping network resources and operating moments.
-
ID Total no. of nodes Type of road network No. of tasks Time window interval Distance between any two points (km) Max. Min. 1-10 30 C 30 60 47 10 11-20 30 C 30 120 59 11 21-30 30 C 30 180 48 5 31-40 30 R 30 60 44 3 41-50 30 R 30 120 60 6 51-60 30 R 30 180 44 5 61-70 30 RC 30 60 94 6 71-80 30 RC 30 120 88 6 81-90 30 RC 30 180 97 5 Table 3.
Example settings.
-
No. of
tasksMax. distance
between tasks
(km)Min. distance
between tasks
(km)Max. task
time window
(min)Min. task
time window
(min)5 46.1 5 313 60 15 59.8 5 333 47 25 59.8 5 333 47 Table 4.
Settings for the example of newly added tasks.
-
Cost of vehicle count deviation (CNY/vehicle) Tractor heavy trailer deviation cost (CNY/km) Tractor empty trailer deviation cost (CNY/km) Tractor idle deviation cost (CNY/km) Tractor early arrival penalty (CNY/min) Cost of penalties for abandoning transportation tasks (CNY/task) 300 2.2 1.89 1.51 10 300 Table 5.
Parameter setting for deviation costs.
-
Initial temperature (°C) Cooling rate Abandonment of temperature (°C) Internal cycle time (T is the current temperature) 100 0.7 1 100-T/20 Table 6.
Parameter setting for the CNSAA algorithm.
Figures
(14)
Tables
(6)