-
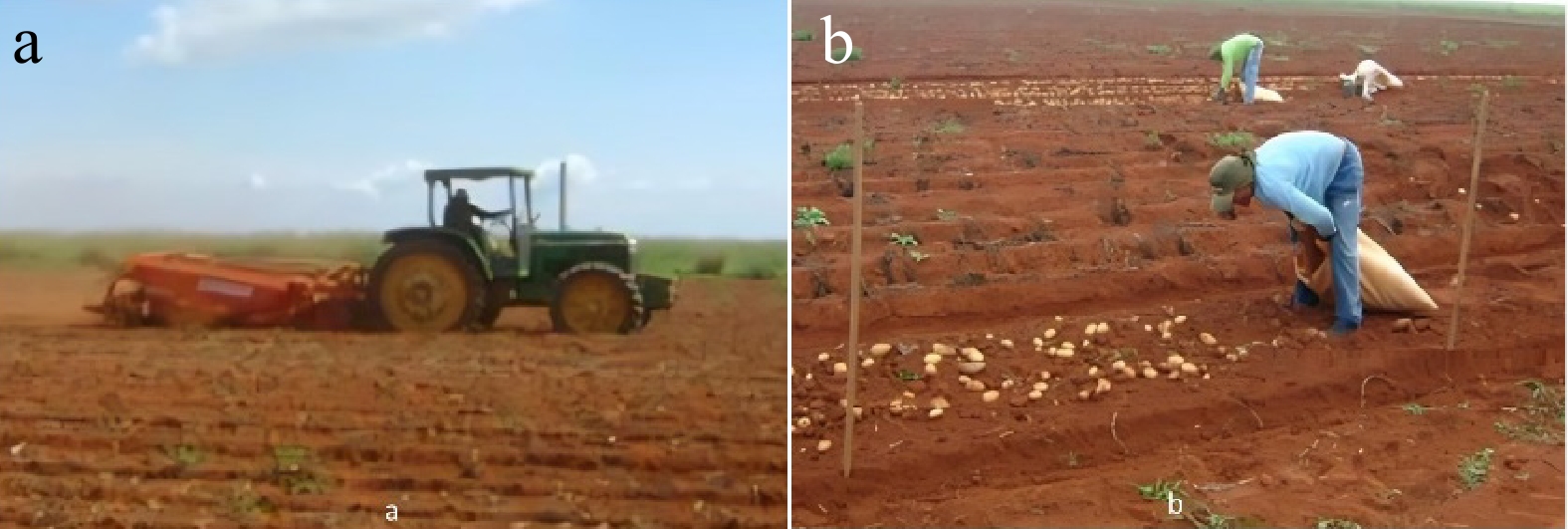
Figure 1.
Semi-mechanical harvesting process. (a) Potato digger. (b) Manual potato collecting[20].
-

Figure 2.
Mechanical potato harvester[20].
-
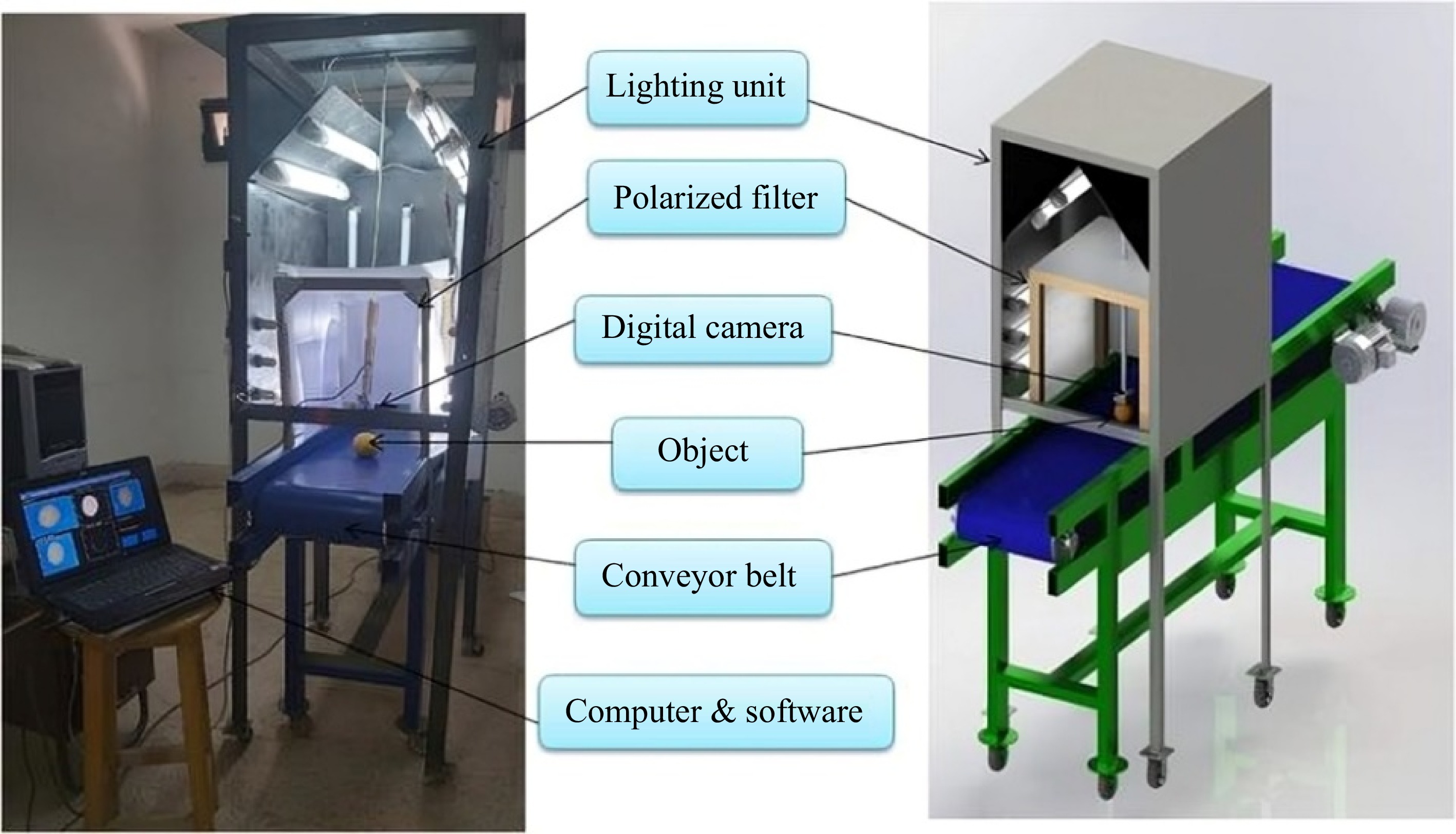
Figure 3.
Machine vision model developed for potato quality inspection[43].
-
Specifications Advanced harvester Ref. A new potato digger was designed with a negative blade with cutting discs and soil compactors on both sides of the digger, reducing the traction resistance by 18%. This improvement increased the hollowing rate of the potato layer and soil, contributing to a 22% increase in productivity. The new design achieved a yield of 13.2 t/ha and a digging completion rate of 99.1%. In comparison, the KST-1.4 series digger achieved a completion rate of 97.6%, confirming the effectiveness of the proposed design in improving the overall harvesting performance. 
[32] The potato harvester is designed to harvest two rows of potatoes at once. The working mechanism is based on breaking the soil to expose the potatoes, which are then lifted using a separator conveyor system that includes a chain bar and a hoist conveyor and is operated by a 40-hp tractor. The initial design proved effective, with a field capacity of 0.26 ha/h, a bruising rate of 6%, and a transfer rate of 98.4% of the dug potatoes to the cart with a field loss of 1.6%. 
[7] A rotary component was added to the design of the potato harvester to improve the soil fragmentation process and reduce the soil masses lifted during separation. The researchers modified several parameters such as the machine's travel speed, rotor rotation frequency, rotor diameter, and the distance between the spherical discs to study their effect on the performance of the device. The results showed a significant improvement in soil separation as the rotor diameter increased from 0.65 to 1.0 m, and as the travel speed increased from 0.8 to 1.5 m/s. 
[28] The potato pile separator with self-cleaning cylinders was used to improve the soil separation process. The researchers determined the optimum parameters of the spiral separator, which include a peripheral rotation speed of 1.75 to 2.0 m/s, a separator inclination angle relative to the horizon of 15° to 19°, and a screw fixation concentricity of 5 to 10 mm. The researchers also recommended a forward speed of 2.16 to 2.88 km/h. The results showed that increasing the inclination angle and screw concentricity improved the soil screening and separation density. On the other hand, increasing the peripheral rotation speed to about 2 m/s led to a gradual decrease in the sieved soil ratio, where a rapid decrease in this ratio was observed after exceeding 2 m/s. 
[33] A V-shaped pile distributor has been added to the potato digger to improve the separation process. By distributing the excavated pile evenly across the width of the elevator grid, the separation quality is improved. This has been shown to increase the purity of tubers in the bin to 97.4%, as well as increasing productivity (by 0.16 ha/h). The machine operates efficiently at speeds above 3.55 km/h, exhibiting less tractive resistance than conventional models. 
[35] A left and right rotation formula was developed for the potato soil separator, with the rotation speed of the separating cylinder being 100 rpm and the center distance of the separating cylinder being 79 mm. The results showed that the bruising rate was 1.25%, the clean potato ratio was 99.01%, and the peel breakage rate was 1.58%. When the inclination angle of the device was set at 8°, the rotation speed of the separating cylinder was reduced to 80 rpm while keeping the same center distance of the cylinder, resulting in an increase in the bruising rate to 1.43%, the clean potato ratio to 98.64%, and the peel breakage rate to 1.77%. 
[36] Table 1.
Specifications of some types of advanced potato harvesters.
-
Application Methodology Results Ref. Quality inspection High-speed machine vision system for classification based on weight, sectional diameter, shape, and color, using CCD cameras and image processing algorithms. Achieved overall success rates of 86.5% for weight, diameter, shape, and color inspections. [44] Surface defect detection A light chamber and CCD cameras were used to capture images to detect defects such as vegetation and scab. The detection accuracy ranged from 86.8% to 98.6% for various defects. [45] Depth imaging for defect detection Implemented a depth imaging system combined with convolutional neural networks to assess surface defects. Achieved 94.5% accuracy in size classification and 91.6% in appearance classification. [46] Ultraviolet imaging for
tubers detectionDeveloped a machine vision system using ultraviolet imaging to distinguish potato tubers from clods on a conveyor. Enhanced detection capabilities for tuber identification. [47] 3D model rebuilding for feature prediction Employed machine vision with multispectral and hyperspectral cameras for predicting potato features like length and mass. Enabled accurate predictions of physical characteristics, aiding in quality grading. [48] Table 2.
Applications of machine vision systems for potato quality inspection.
Figures
(3)
Tables
(2)