-
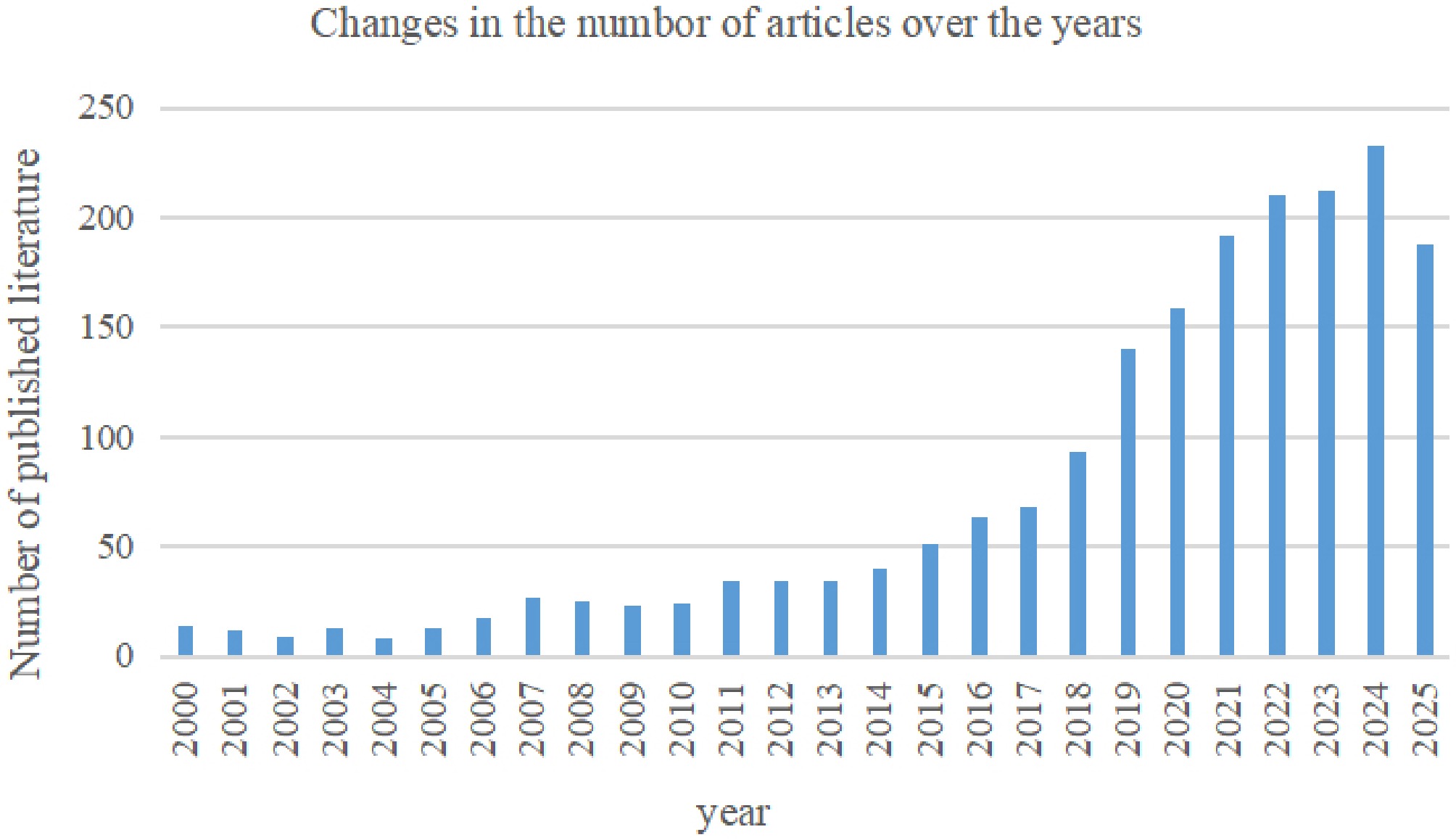
Figure 1.
Annual trend in publication volume.
-
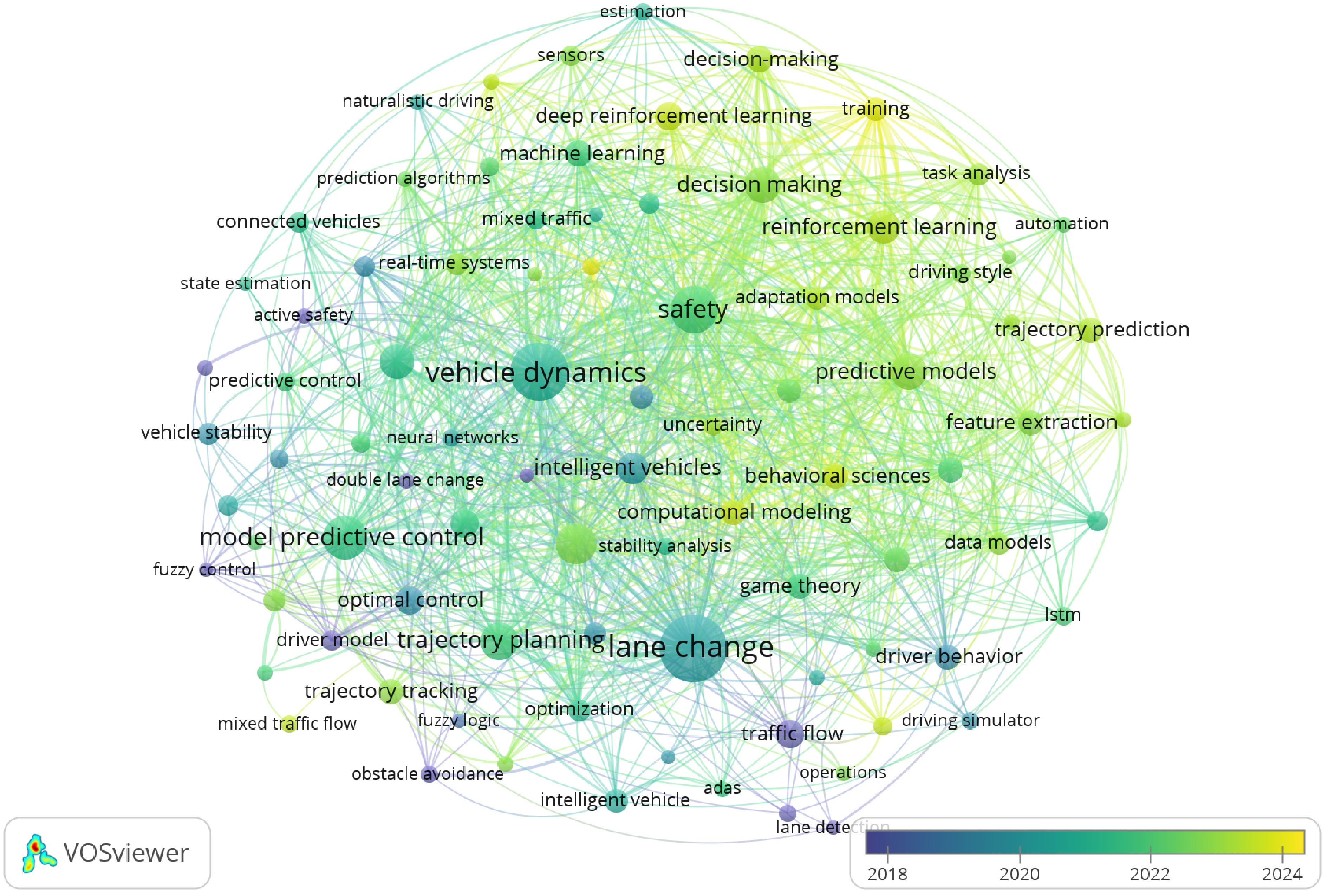
Figure 2.
Keyword visualization.
-
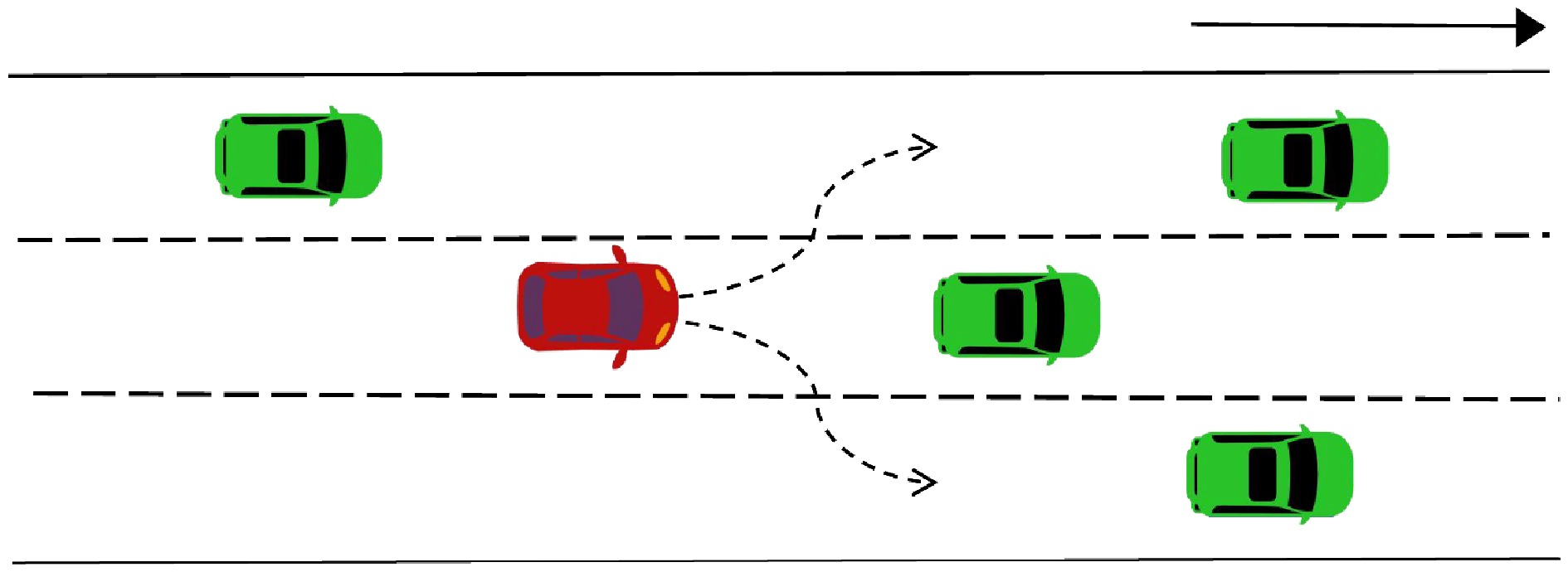
Figure 3.
Discretionary lane change.
-
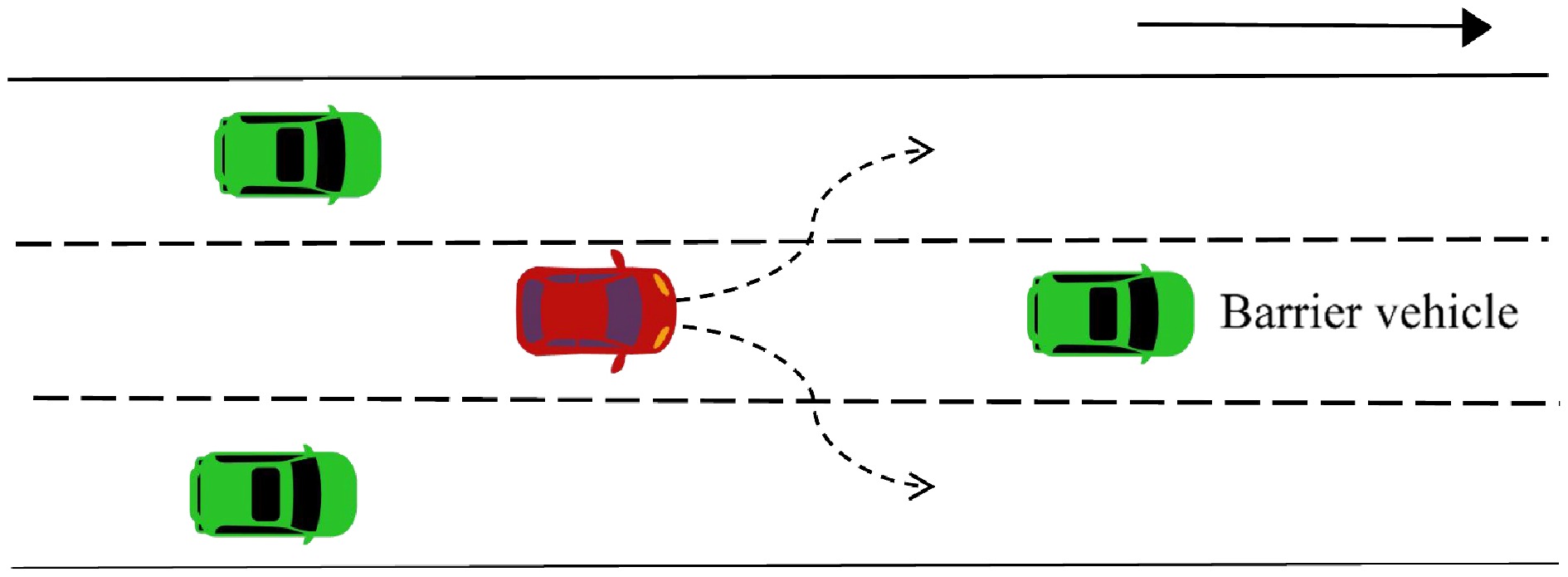
Figure 4.
Mandatory lane change.
-
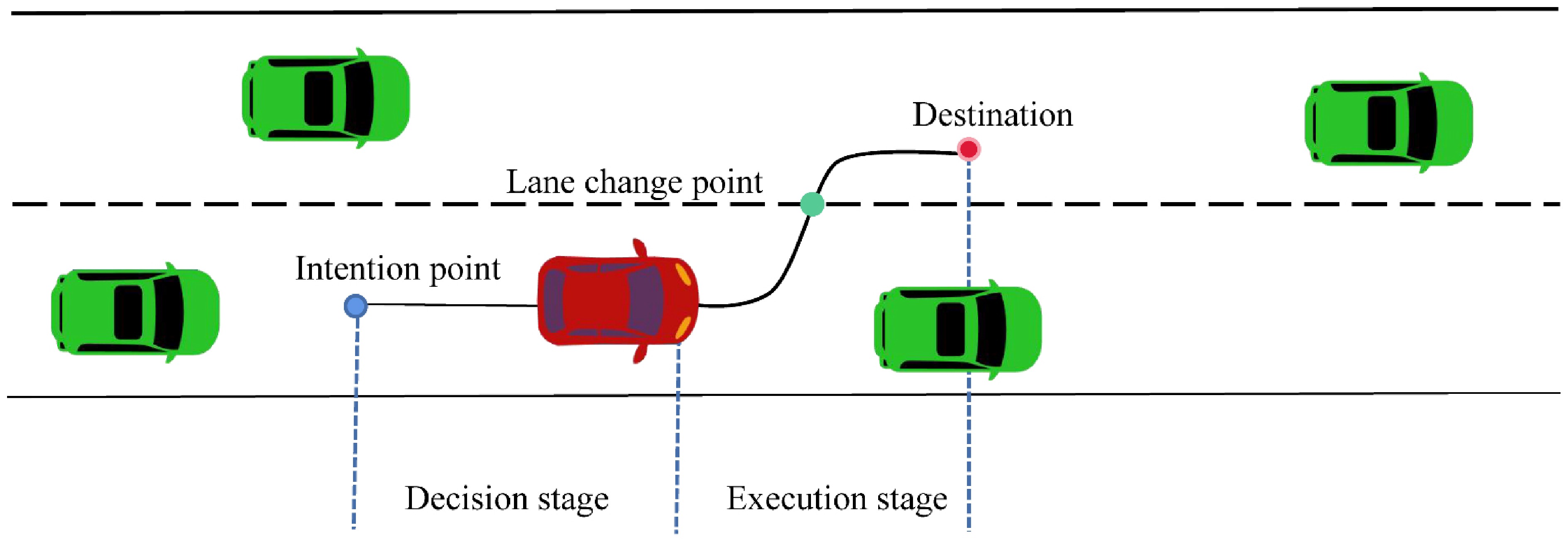
Figure 5.
Schematic diagram of the phases of lane change.
-
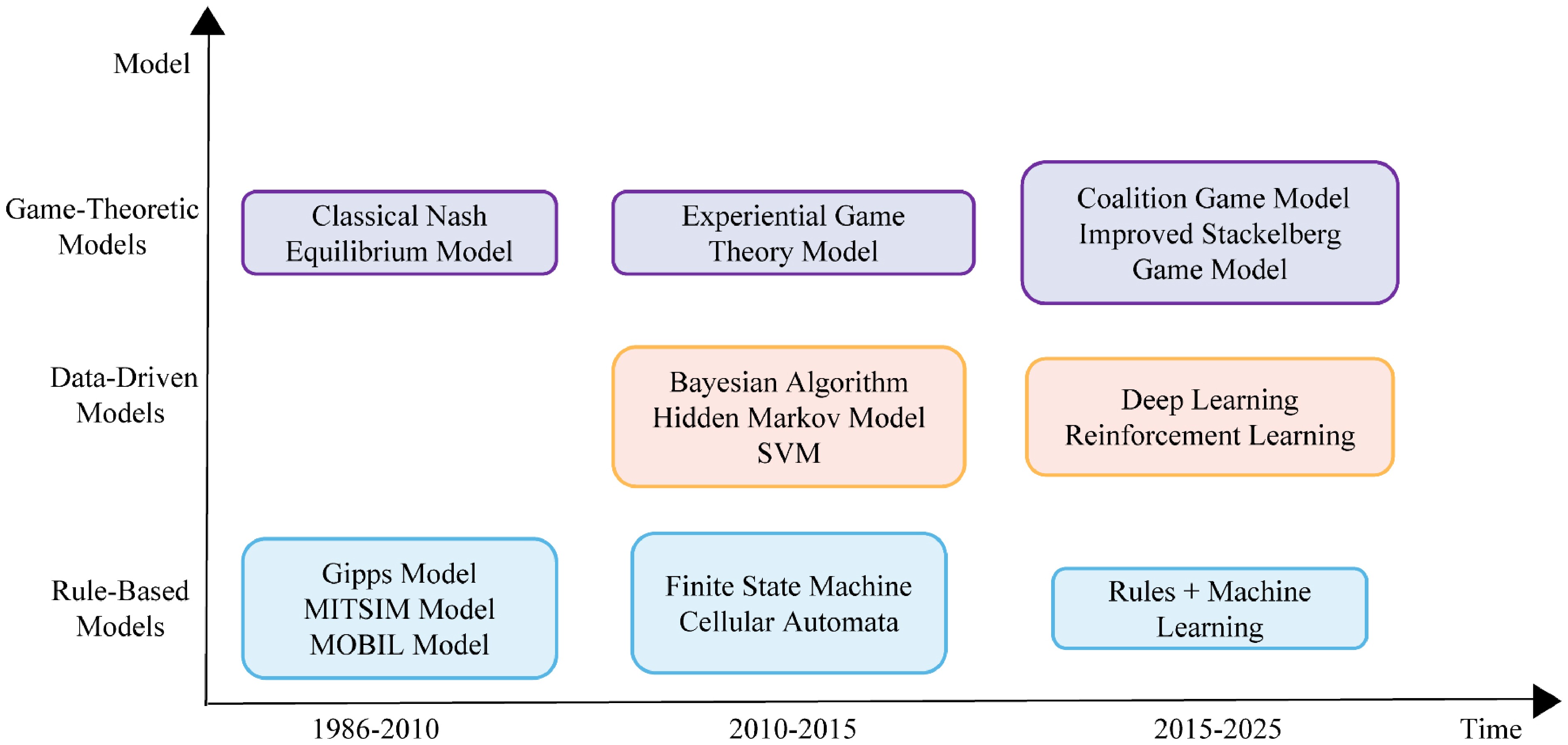
Figure 6.
Classification diagram of lane change decision model.
-
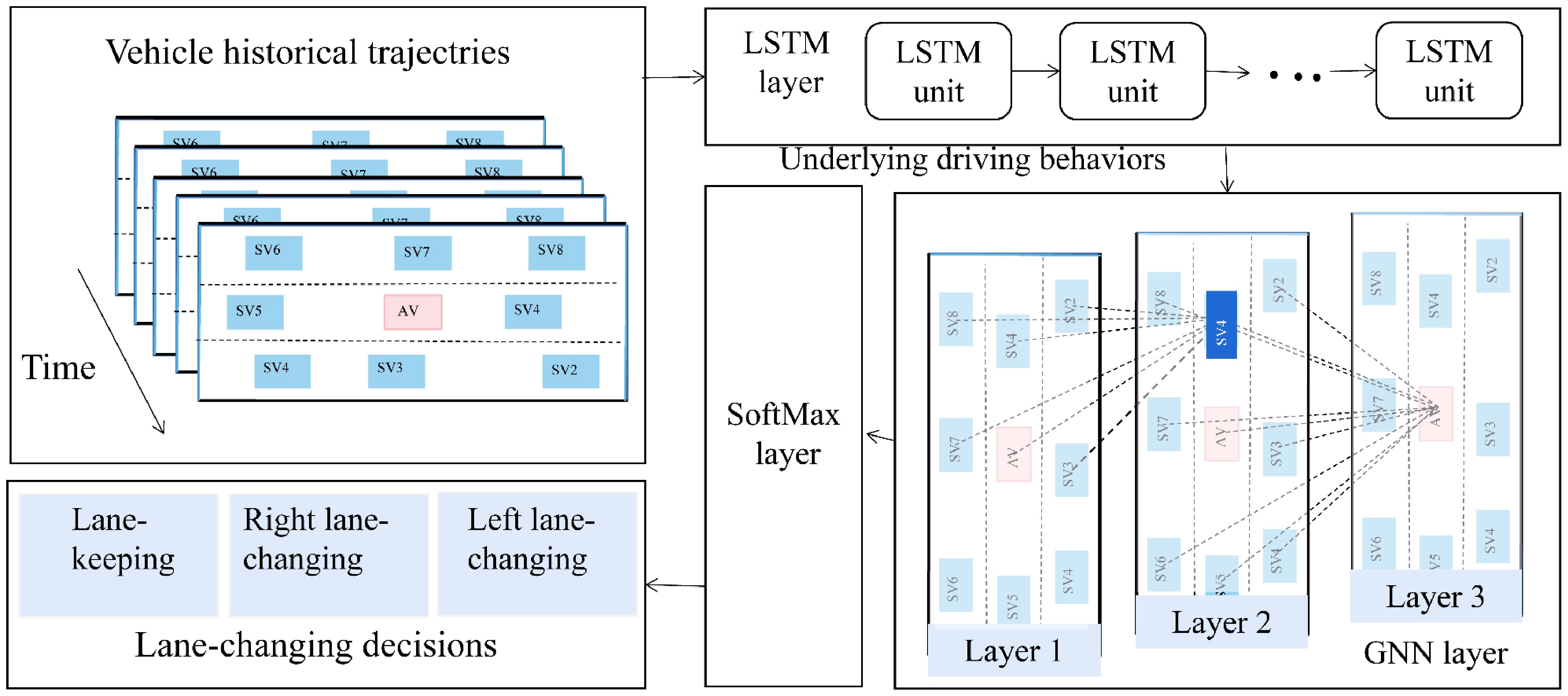
Figure 7.
LSTM-GNN network architecture. 'sv1–sv8' respectively represent different surrounding vehicles.
-
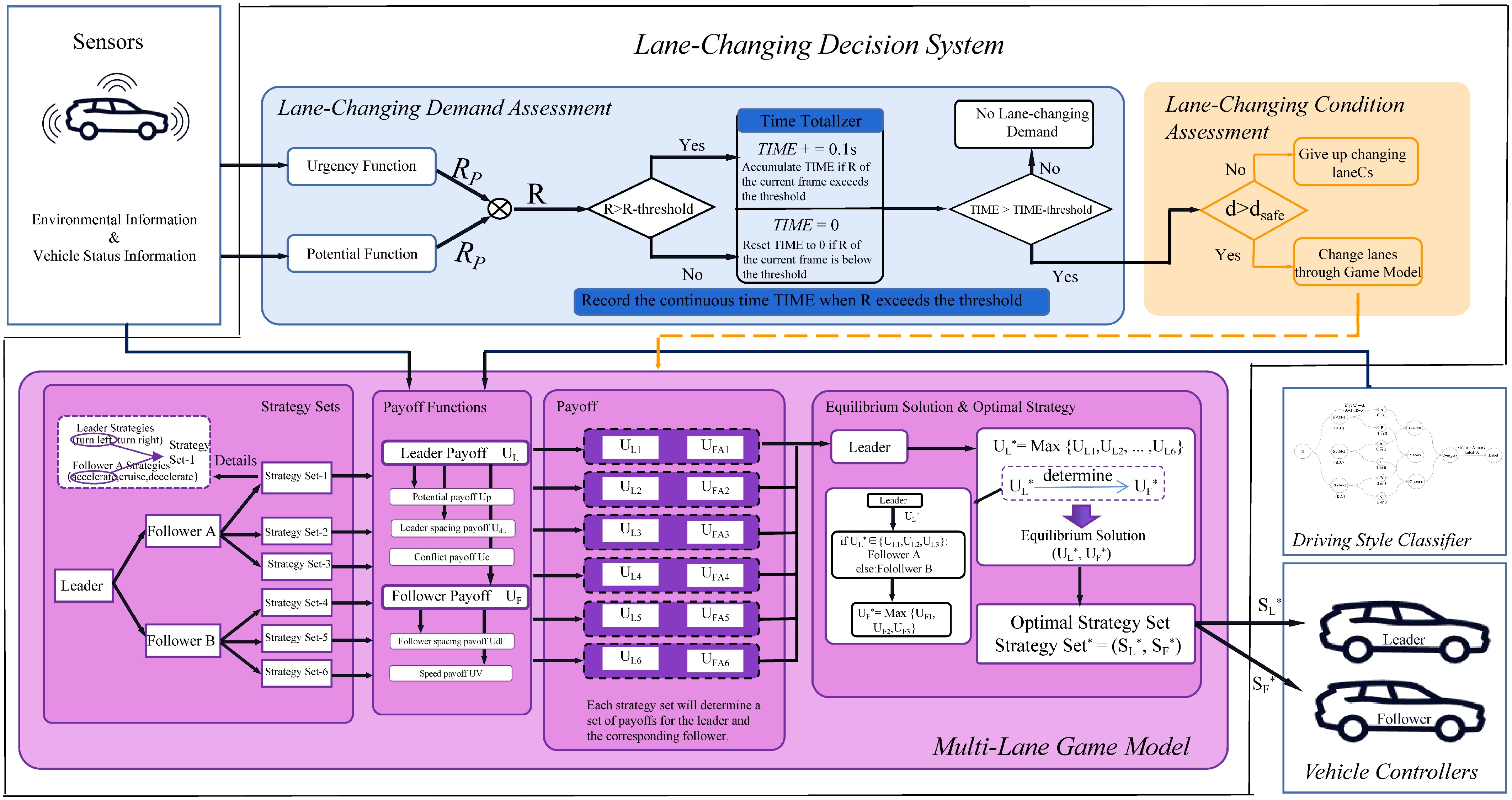
Figure 8.
Lane change decision system.
-
Method used Advantages Year Ref. Long short-term memory Analyzes the factors affecting driving safety and the scope of potential risks 2020 [23] Multimodal trajectory prediction Explains human driving behavior by adjusting subjective risk parameters; suitable for mixed traffic scenarios. 2022 [24] Fuzzy logic theory Reveals the spatiotemporal dynamics of risk states and quantifies the influencing factors of risk. 2023 [25] Probabilistic model Fully considers position uncertainty and distance-based safety indicators. 2022 [26] Traffic conflict index Breaks through traditional single-threshold methods and enables dynamic risk grading. 2020 [28] Traffic conflict index Dynamically expands the TTC model based on high-precision microscopic trajectory data. 2022 [29] Table 1.
Lane change risk assessment methods.
-
Input variables Algorithm Issues Advantages Year Ref. Vehicle state and driver behavior features Rule-based two-stage decision model Driver behavior is not classified Quantitatively considered the response of following vehicles in the target lane 1986 [30] Traffic flow data and vehicle dynamic information MITSIM Does not consider nearby vehicles during lane changes Incorporated probabilistic logic, reflecting driver risk preferences 1996 [31] Position, speed, and acceleration of the vehicle and surrounding vehicles MOBIL Ignored vehicle dynamics during lane changes Applied benefit–safety dual-condition mechanism, closer to human driving 2007 [32] Road information, vehicle information, and other obstacle data HSM + RCS Insufficient model generalization and simplified safety evaluation Used real-road data and RCS to quantify lane change risk 2018 [34] Dynamic traffic data of vehicles Fuzzy inference + FSM Limited applicability of the algorithm, strong rule dependence Effectively handled uncertain information 2023 [35] NGSIM database Cellular automata model Overly simplified model Quantifying the differences in human driving styles 2023 [36] US-101 NGSIM database Rule-based + machine learning Motion prediction model remained relatively simple Balanced interpretability with adaptability to complex scenarios 2022 [37] Table 2.
Rule-based lane change decision method.
-
Input variables Algorithm Issues Advantages Year Ref. US-101 and I-80 NGSIM database SVM Relies on manual feature extraction, limited dynamic scene adaptability Incorporates physical, interaction, and road structure features 2020 [38] US-101 NGSIM database ABC-SVM Relies on ego-vehicle data, neglects surrounding traffic environment Avoids grid search inefficiency and local optima 2021 [39] US-101 NGSIM database Bayesian Network Lacks a real-time updating mechanism; limited adaptability Transforms driver decision uncertainty into quantifiable probabilistic outputs 2020 [40] High D dataset LSTM + Bayesian Network Neglects personalized factors such as driver style and vehicle type Dynamically updates decision thresholds, adapts to diverse traffic environments 2021 [41] Vehicle state, driver operations, and environmental data Improved IOHMM Lacks validation under real-world driving environments Addresses IOHMM limitations in sequential memory and continuous outputs 2021 [44] High D GMM-HMM Does not consider applicability in mixed traffic flows Identifies spatiotemporal interactions and high-risk patterns in lane changes 2023 [45] Table 3.
Lane change decision-making method based on traditional learning.
-
Input variables Algorithm Issues Advantages Year Ref. NGSIM database DBN-LSTM Lacks dynamic modeling of driving styles Simulate the entire lane changing process and its impact on traffic flow 2019 [46] NGSIM database LSTM-GNN Ignores key behavioral features; simplified interaction modeling Fully models multi-vehicle interactions, significantly improving decision accuracy 2023 [47] Dynamic motion images CNN-based dynamic motion image representation Limited generalization to real-world scenarios and high computational cost Captures surrounding vehicles' positions and motion comprehensively 2023 [48] Comma2k19 and Udacity datasets Spatiotemporal attention-based deep learning Complex model, long training time Spatiotemporal attention highlights important frames and key regions 2022 [49] Vehicle state space and action space DSCNN- Transformer Not suitable for complex urban roads Maintains temporal modeling capability while reducing computational load 2023 [50] Table 4.
Lane change decision method based on deep learning.
-
Input variables Algorithm Issues Advantages Year Ref. Relative positions and speeds of vehicles Rainbow DQN Unable to jointly optimize longitudinal speed and lane changing timing Introduces a safety feedback reward mechanism 2020 [52] Longitudinal/lateral distances, yaw angle, relative distances DRL + Risk assessment function Ignores driving styles; model applicability is limited to specific Achieves optimal driving strategy with minimum expected risk 2022 [26] US-101 NGSIM database D3QN+DDPG Fails to consider trajectory continuity and heterogeneous traffic flow Safely and efficiently handles lane changing and car-following behaviors 2022 [53] High D dataset DRL Limited application scenarios; reward function lacks consideration of comfort Incorporates a collision-avoidance strategy to ensure longitudinal safety 2023 [55] Relative distance, relative speed, and lane-relative position DQN + IRL High computational complexity and depends on expert data from driving simulators Integrates behavior, planning, and control modules for joint training and execution 2025 [56] Ego vehicle's longitudinal acceleration, yaw rate, surrounding vehicles' speeds and distances OARL Limited by discrete actions; cannot handle continuous steering control Maintains high performance and safety under observation disturbances 2023 [57] Vehicle position, speed, acceleration, and traffic light information AH-TD3 Lacks timeliness and poor continuity in modeling interactive behavior Mixed action representation integrates discrete and continuous actions 2024 [58] Table 5.
Lane change decision method based on reinforcement learning.
-
Input variables Algorithm Issues Advantages Year Ref. Traffic conflict indicators Two-player non-zero-sum non-cooperative game Oversimplified assumptions underestimate real-road complexity Demonstrates feasibility of applying game theory to traffic interaction modeling 1999 [59] Vehicle state information Stackelberg Game with Incomplete Information Relies on sensor data, subject to perception errors Capable of handling uncertainty and enabling dynamic decision updates 2016 [60] Vehicle state and environmental information Non-cooperative mixed-strategy game Insufficient consideration of driving style diversity Incorporates a dynamic risk model into the lane changing game 2022 [61] Vehicle state information and driving style parameters Coalition game model High computational complexity; relies on stable V2X communication Introduces perceived risk field theory to quantify uncertainties in mixed traffic 2023 [62] High D dataset Incomplete information game Overemphasis on human driving uncertainty while ignoring vehicle dynamics constraints Uses Risk–Response (R-R) diagram to interpretively quantify social driving preferences 2024 [63] NGSIM dataset Hierarchical game theory model Assumes fully rational vehicles, while real-world mixed traffic is not fully rational Dynamically selects game model based on RDS 2024 [64] Vehicle status information and traffic trend prediction data Prediction-enhanced game theory model Oversimplified scenarios, only two-vehicle games are considered while real lane changes involve multi-vehicle interaction Utilizes macroscopic traffic flow information for proactive decision-making 2024 [65] US-101 NGSIM database Improved Stackelberg game theory Ignores multi-lane continuous lane changing demand; insufficient safety mechanisms Strong adaptability in multi-lane scenarios with online real-time classification of driving styles 2025 [66] Table 6.
Decision-making method for lane change based on game theory.
Figures
(8)
Tables
(6)