-
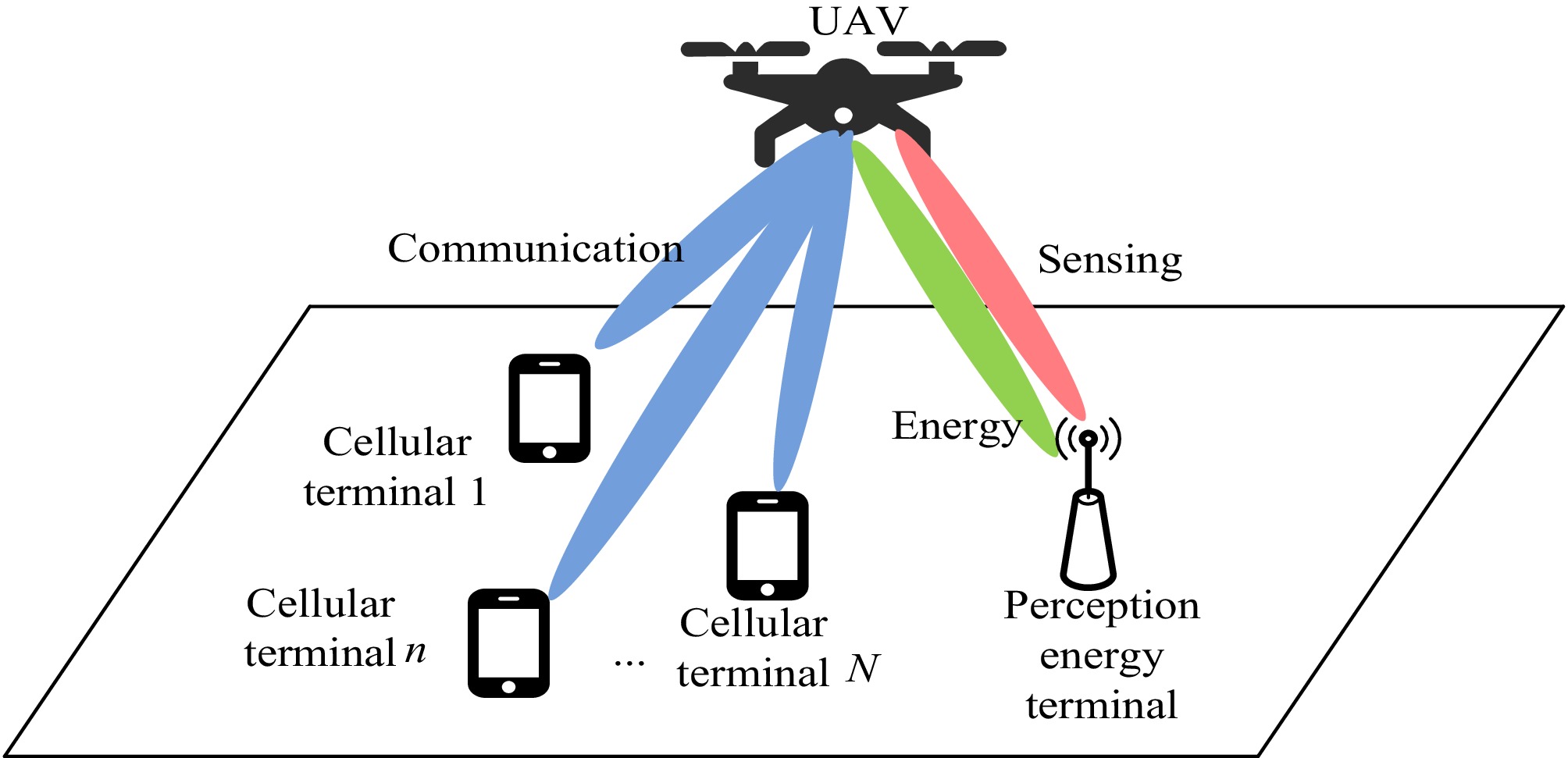
Figure 1.
EAU-ISAC scenario.
-
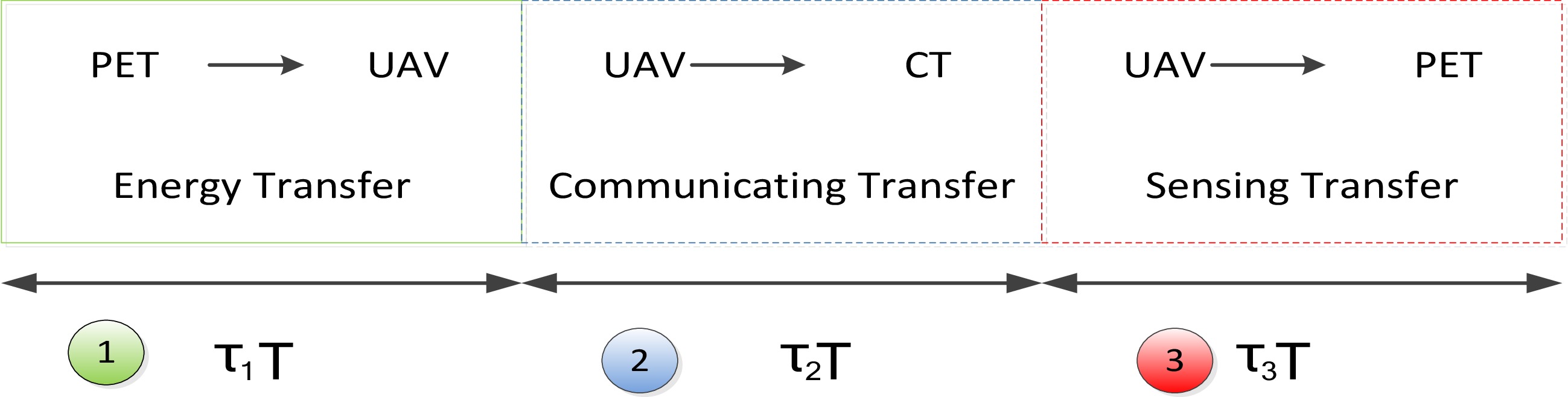
Figure 2.
EAU-ISAC protocol.
-
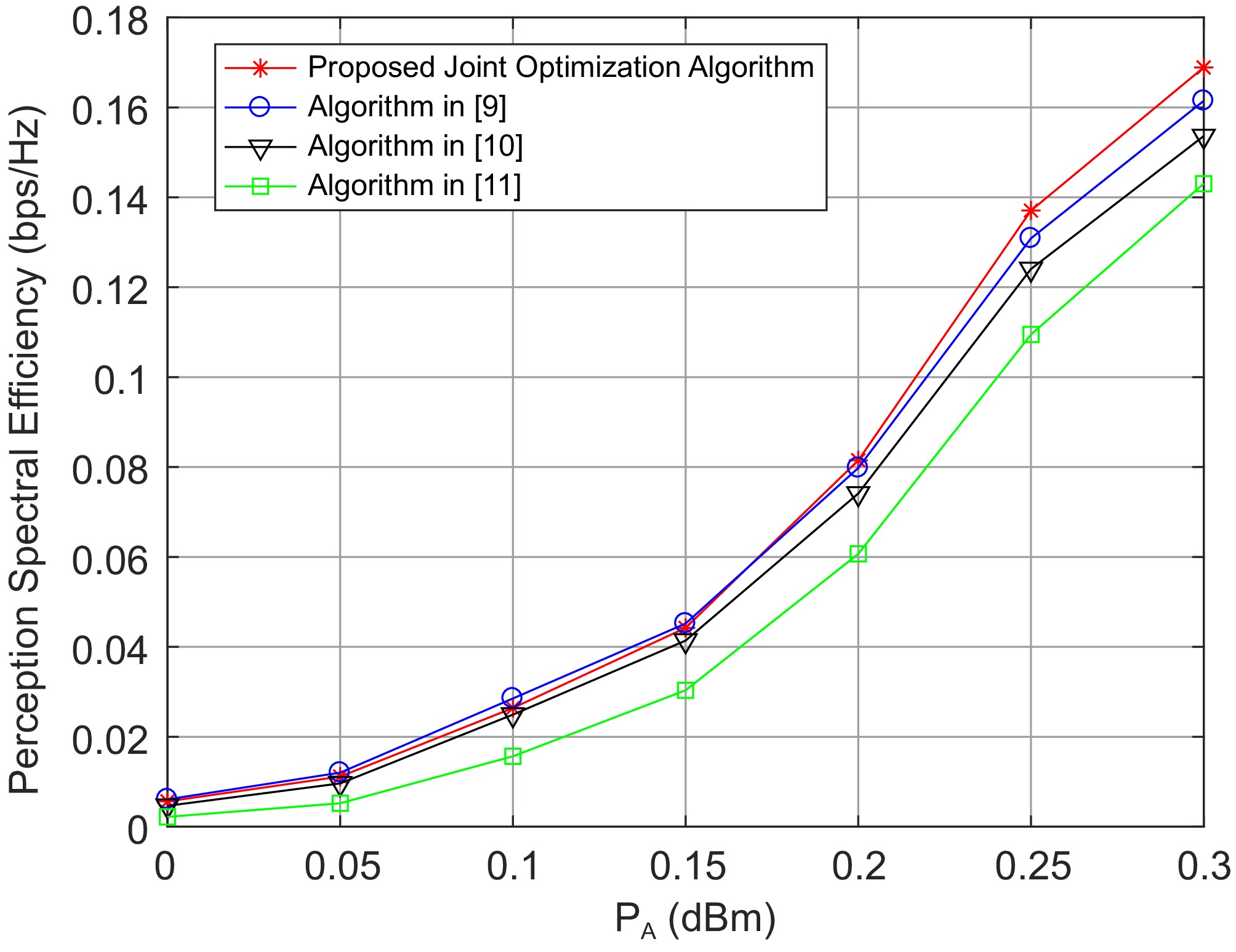
Figure 3.
Perceived spectral efficiency with N = 4 and M = 4.
-
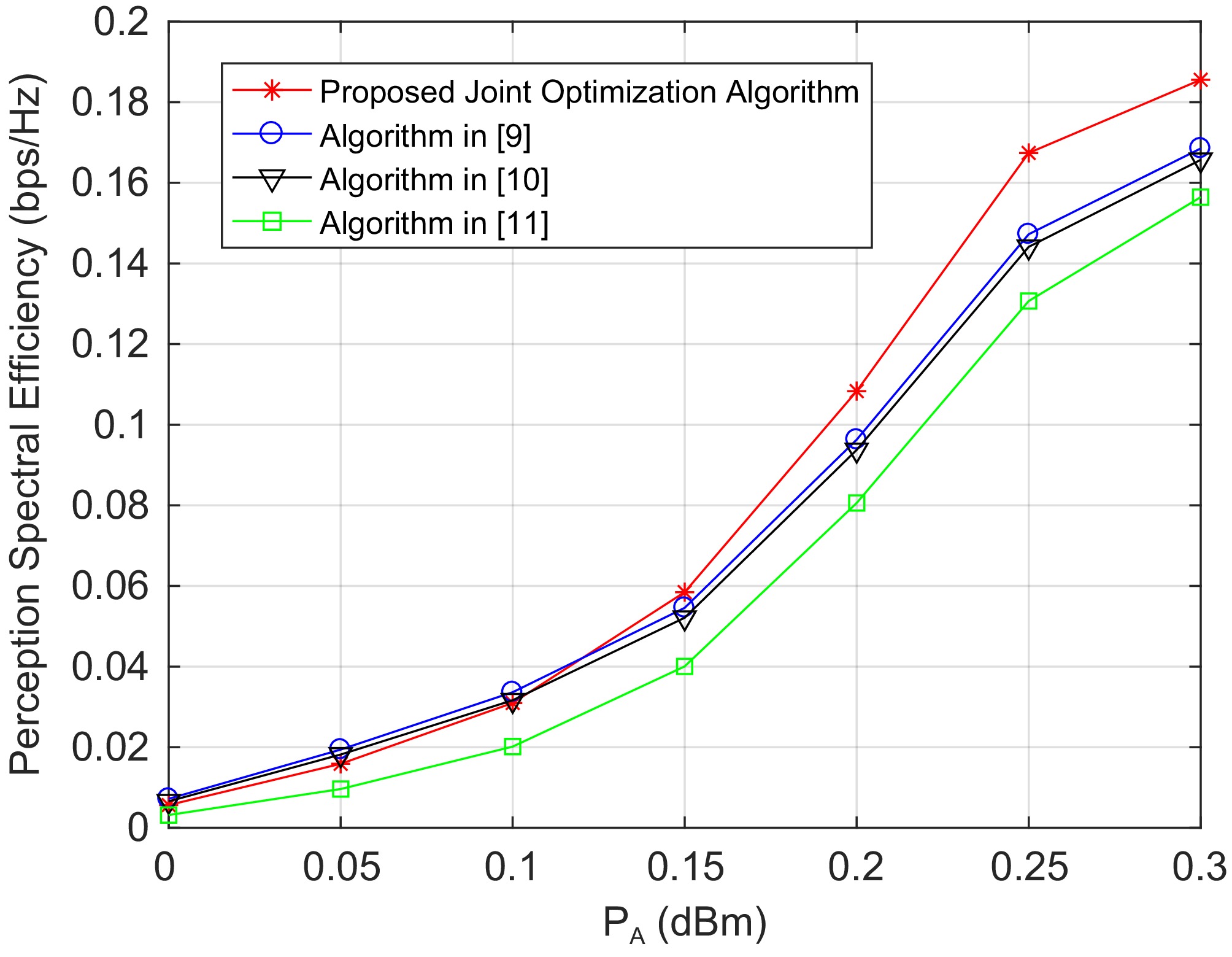
Figure 4.
Perceived spectral efficiency with N = 4 and M = 12.
-
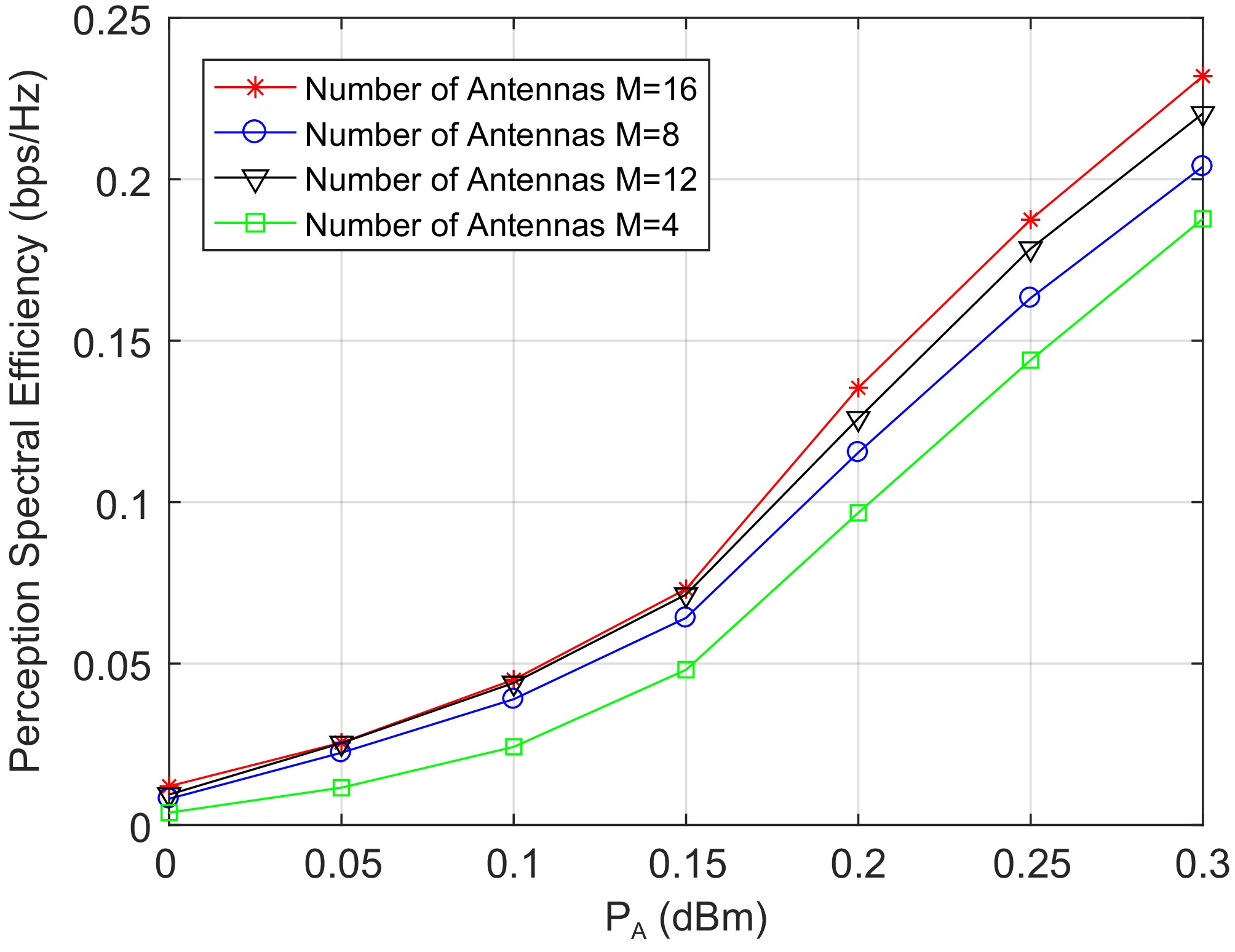
Figure 5.
Relationship between perceived spectrum efficiency and number of antenna.
-
1. Initialization: Set the iteration termination number $ N_P^{max} $ $ {\varepsilon _P} $ $W_n^c,\forall n$ $\omega _m^s,\forall m$ 2. Loop body: 3. Update iteration index i = i + 1; 4. Solve the optimization problem $ F({q_i}) = \mathop {\max }\limits_{W_n^c,W_m^s} A $ $ \left\{ {W_n^{c*},W_m^{s*}} \right\} $ 5. Perform EVD decomposition on $ W_n^{c*} $ $ W_m^{s*} $ $w_n^c,\forall n$ $w_m^s,\forall m$ 6. End condition: $ \left| {F({q_i}) - F({q_{i - 1}})} \right| < {\varepsilon _P} $ $ i > N_P^{max} $ 7. Output the optimal solution $ \left\{ {{q^*},W_n^{c*},W_m^{s*}} \right\} $ Table 1.
The optimization algorithm for the beamforming vector under a fixed UAV position.
-
1. Initialization: Set the iteration termination number $ N_u^{max} $ $ {\varepsilon _u} $ 2. Loop body: 3. Update iteration index i = i + 1; 4. Solve the optimization problem F(qi) = $ \mathop {\max }\limits_u A $ 5. Analyze the position information of u* and calculate the UAV position
(x, y, h0) under the current iteration index;6. End condition: | F(qi) − F(qi−1) | < ${\varepsilon _u} $ $N_u^{max} $ 7. Output the optimal solution {q*, u*}. Table 2.
UAV position optimization algorithm under a fixed beamforming vector.
-
1. Initialization: Set the termination times $ N_{outer}^{max} $ $ N_{inner}^{max} $ $ {\varepsilon _{outer}} $ $ {\varepsilon _{inner}} $ 2. External circulation body : 3. Set the initial values q0 = 0 and n = 0 for the outer loop; 4. Using binary method to solve the optimal energy harvesting time slot allocation factor τ; 5. Internal circulation body 1: 6. Set the iteration termination number $ N_P^{max} $ $ {\varepsilon _P} $ $W_n^c,\forall n$ $\omega _m^s,\forall m$ 7. Run Algorithm 1 to solve the optimization problem and run F(qi) = $ \mathop {\max }\limits_{W_n^c,W_m^s} A $ 8. Output the optimal solution $ \left\{ {{q^*},W_n^{c*},W_m^{s*}} \right\} $ 9. End condition of inner loop 1: | F(qi − F(qi−1) | < $ {\varepsilon _P} $ $ N_P^{max} $ 10. Internal circulation body 2: 11. Set the iteration termination number $ N_u^{max} $ $ {\varepsilon _u} $ 12. Run Algorithm 2 to solve the optimization problem F(qi) = $ \mathop {\max }\limits_u A $ 13. Output the optimal solution {q*, u*}; 14. End condition for inner loop 2: | F(qi) − F(qi−1) | < $ {\varepsilon _u} $ $ N_u^{max} $ 15. Calculate F(q) = $ \mathop {\max }\limits_{\tau ,u,\omega } A $ 16. End condition of outer loop: | qn − qn−1) | < $ {\varepsilon _{outer}} $ $ N_{outer}^{max} $ 17. Output the optimal solution {q*, τ*, u*, $ \omega ^* $ Table 3.
UAV position optimization algorithm under a fixed beamforming vector.
Figures
(5)
Tables
(3)