-
About this article
Cite this article
Xing Y, Young R, Nguyen G, Lefebvre M, Zhao T, et al. 2022. Optimal Path Planning for Wireless Power Transfer Robot Using Area Division Deep Reinforcement Learning. Wireless Power Transfer 9: 21885 doi: 10.1155/2022/9921885 

Optimal Path Planning for Wireless Power Transfer Robot Using Area Division Deep Reinforcement Learning
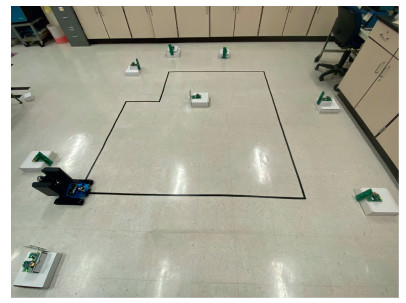
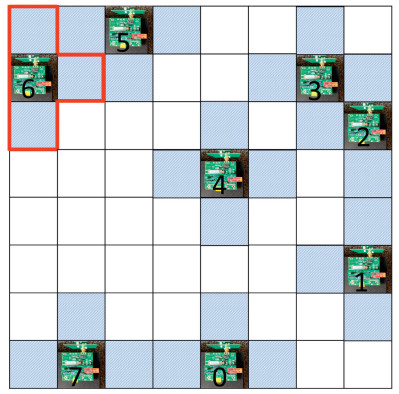
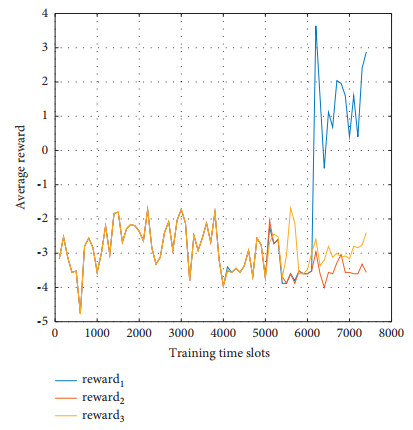
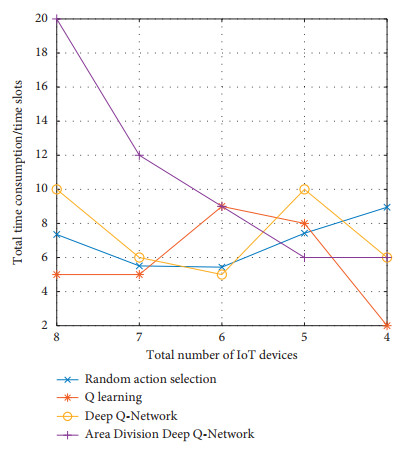
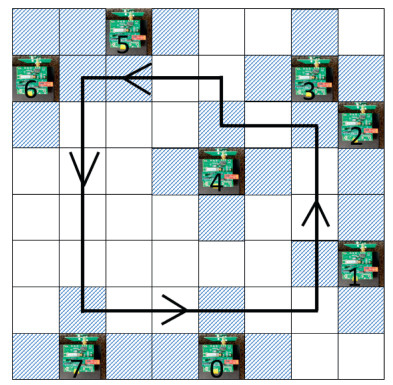
Abstract: This paper aims to solve the optimization problems in far-field wireless power transfer systems using deep reinforcement learning techniques. The Radio-Frequency (RF) wireless transmitter is mounted on a mobile robot, which patrols near the harvested energy-enabled Internet of Things (IoT) devices. The wireless transmitter intends to continuously cruise on the designated path in order to fairly charge all the stationary IoT devices in the shortest time. The Deep Q-Network (DQN) algorithm is applied to determine the optimal path for the robot to cruise on. When the number of IoT devices increases, the traditional DQN cannot converge to a closed-loop path or achieve the maximum reward. In order to solve these problems, an area division Deep Q-Network (AD-DQN) is invented. The algorithm can intelligently divide the complete charging field into several areas. In each area, the DQN algorithm is utilized to calculate the optimal path. After that, the segmented paths are combined to create a closed-loop path for the robot to cruise on, which can enable the robot to continuously charge all the IoT devices in the shortest time. The numerical results prove the superiority of the AD-DQN in optimizing the proposed wireless power transfer system.