-
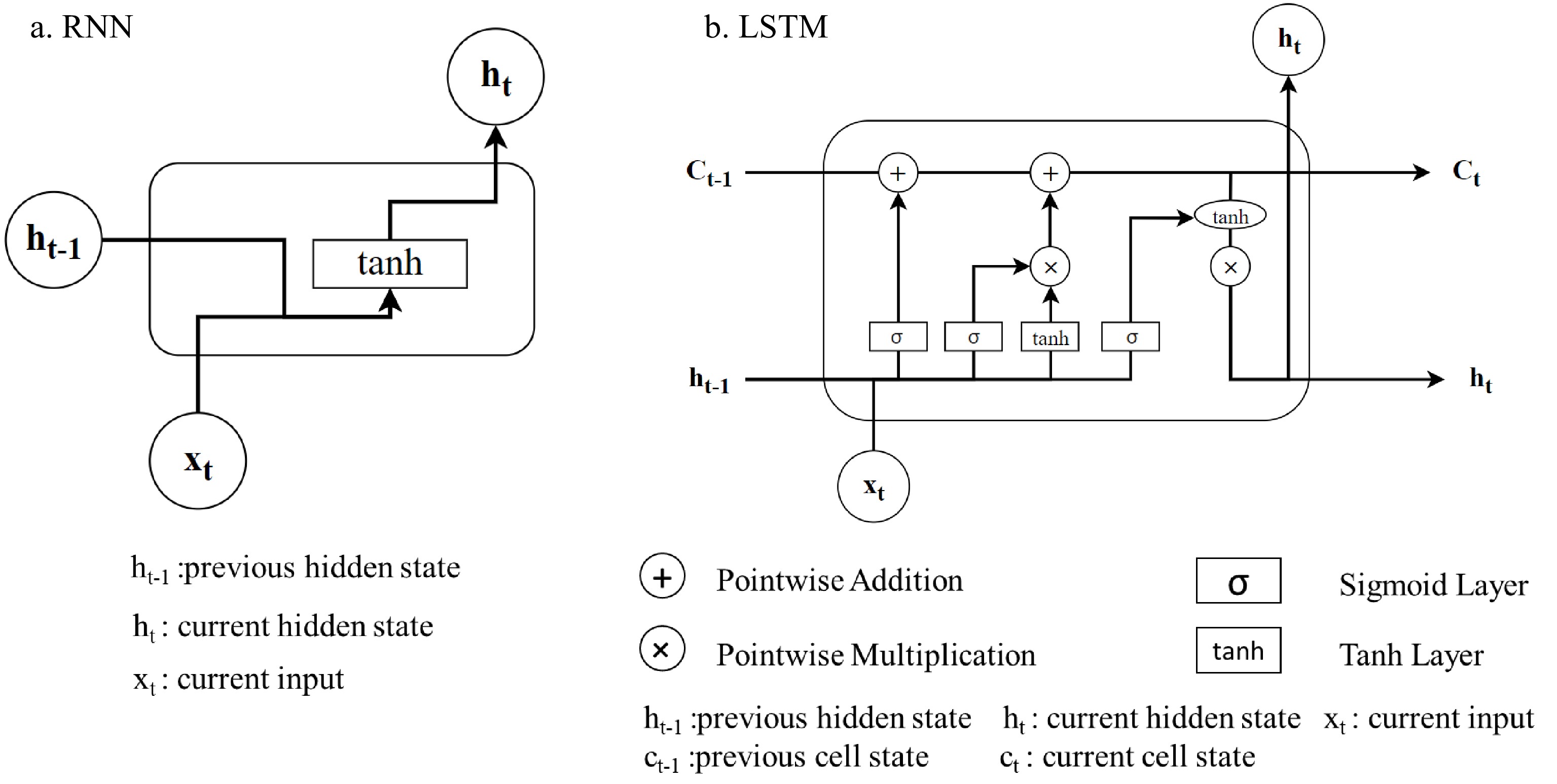
Figure 1.
Recurrent neural network and long short-term memory cell structure.
-
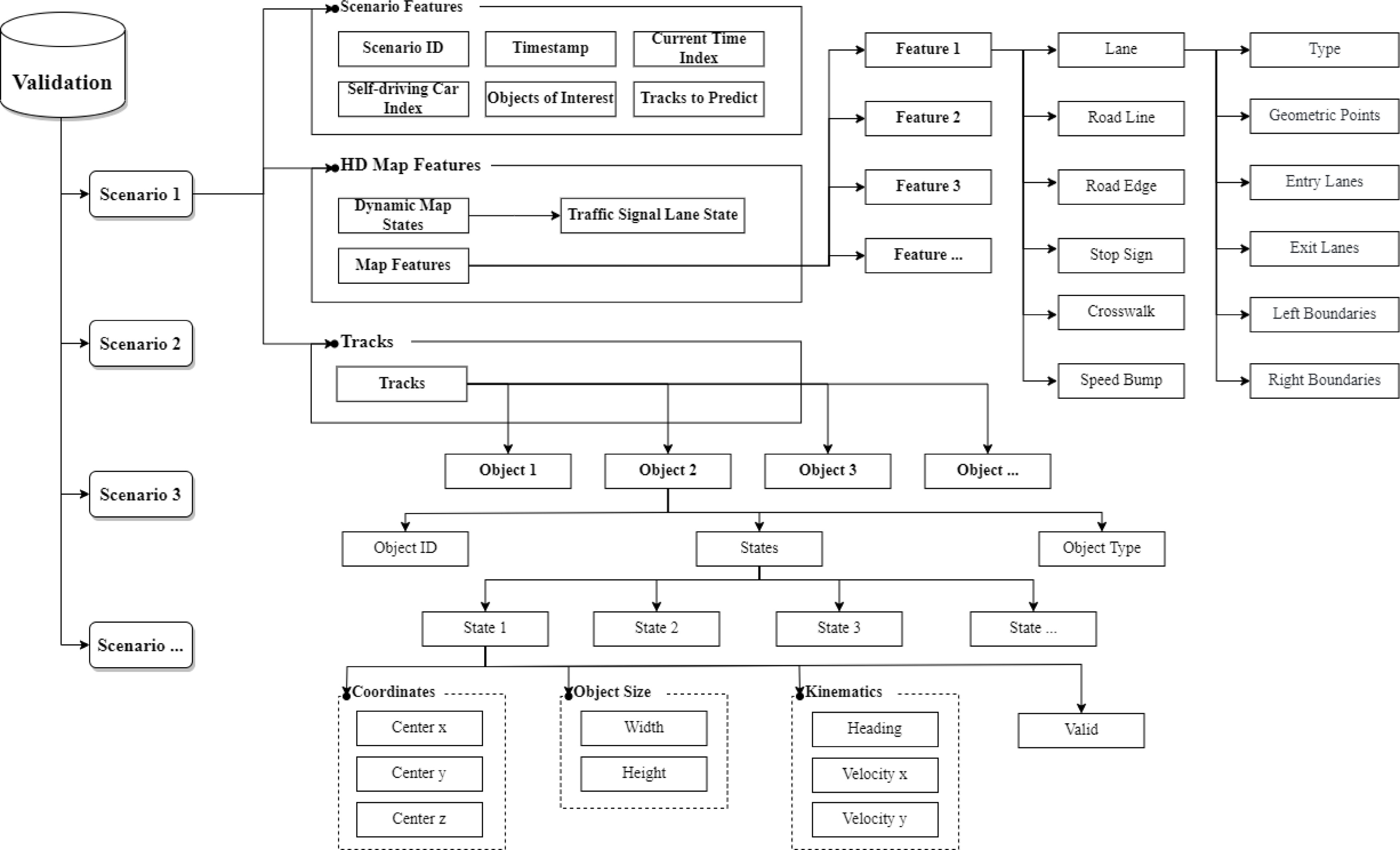
Figure 2.
Structure of the Waymo motion dataset (uncompressed_scenario_validation_validation).
-
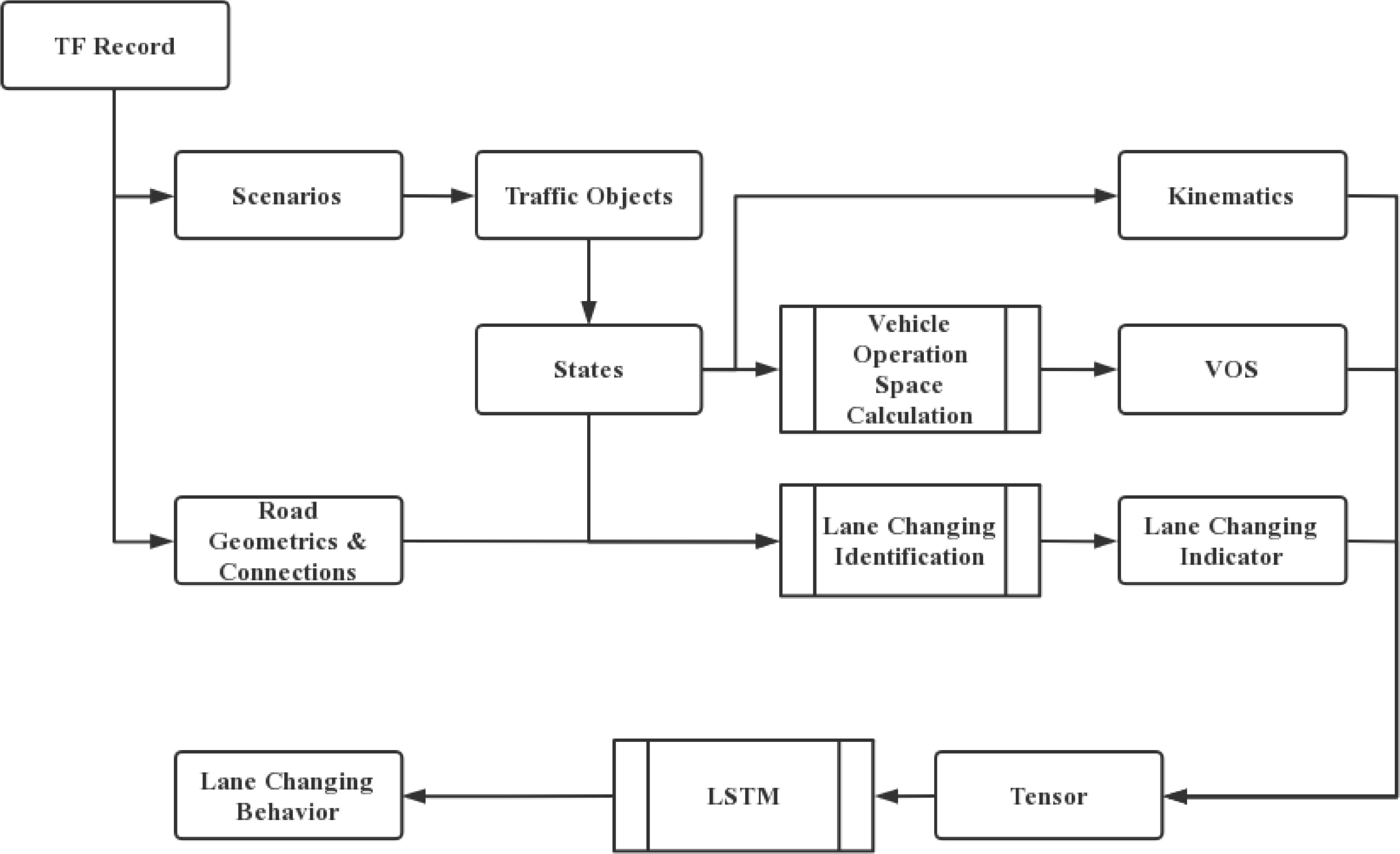
Figure 3.
Conceptual framework.
-
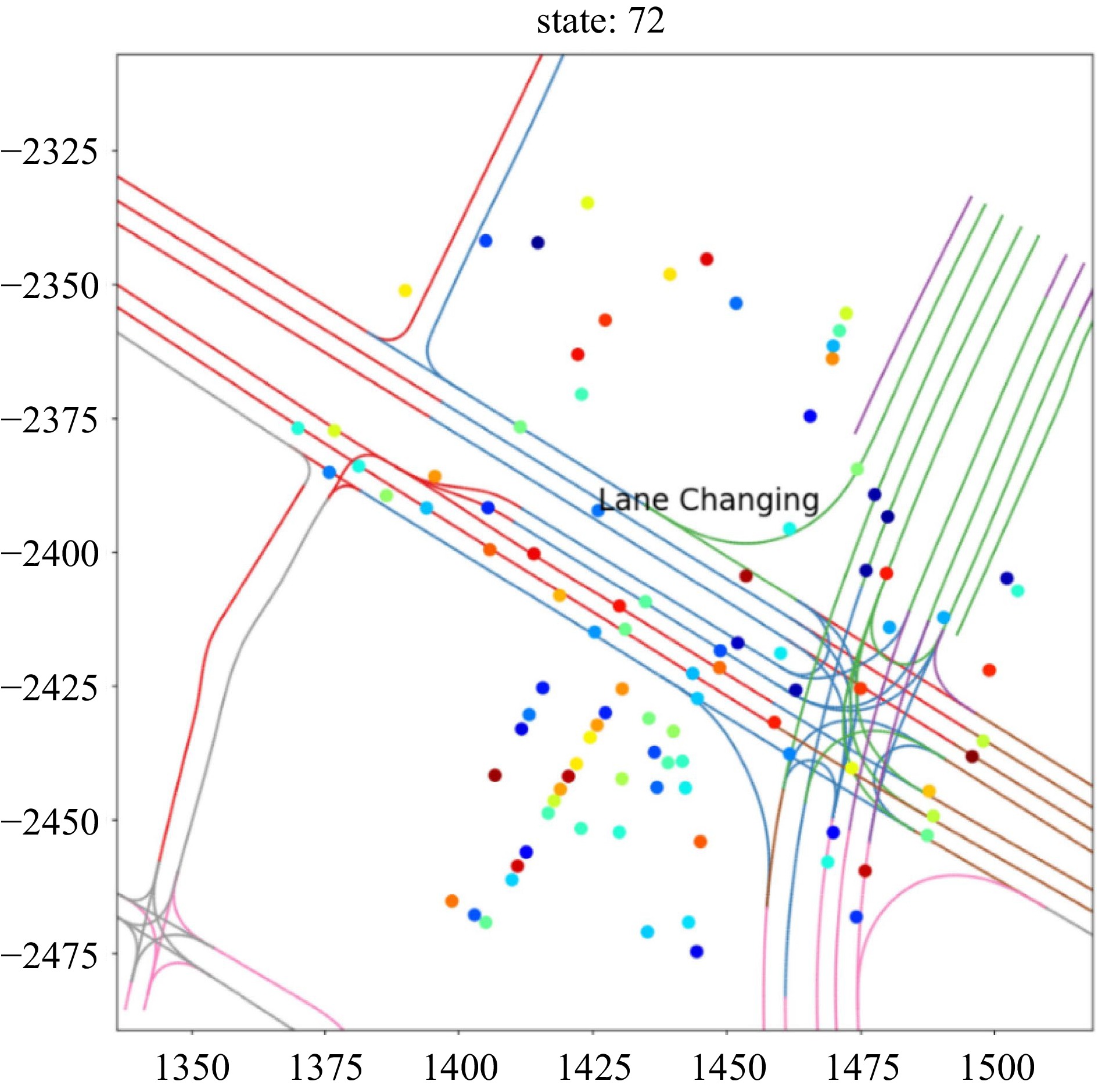
Figure 4.
Identification of lane changing behavior.
-
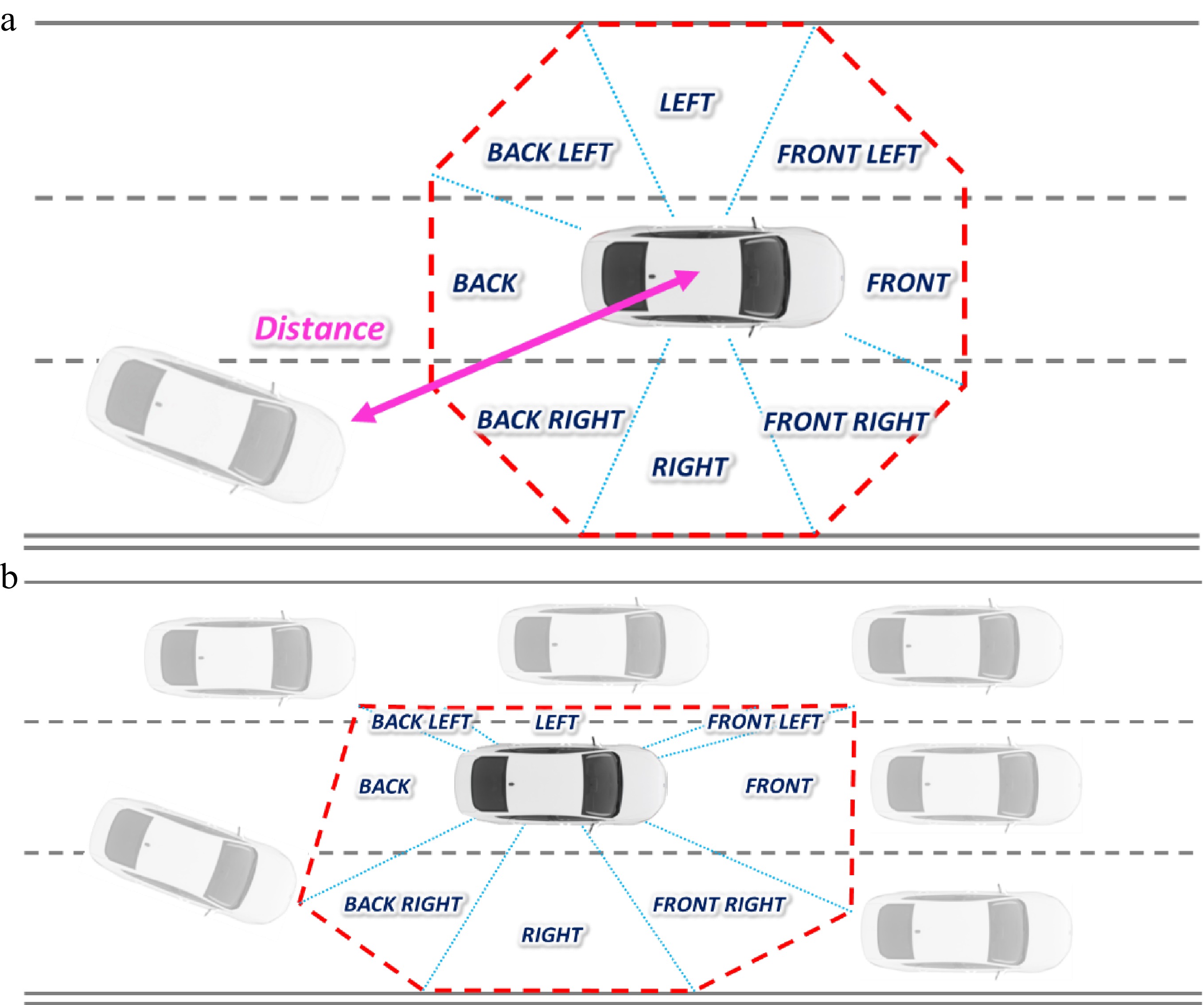
Figure 5.
Describing the driving buffer around the ego car. (a) Vehicle Operating Space in eight dimensions; (b) Vehicle Operating Space affected by surrounding vehicles.
-
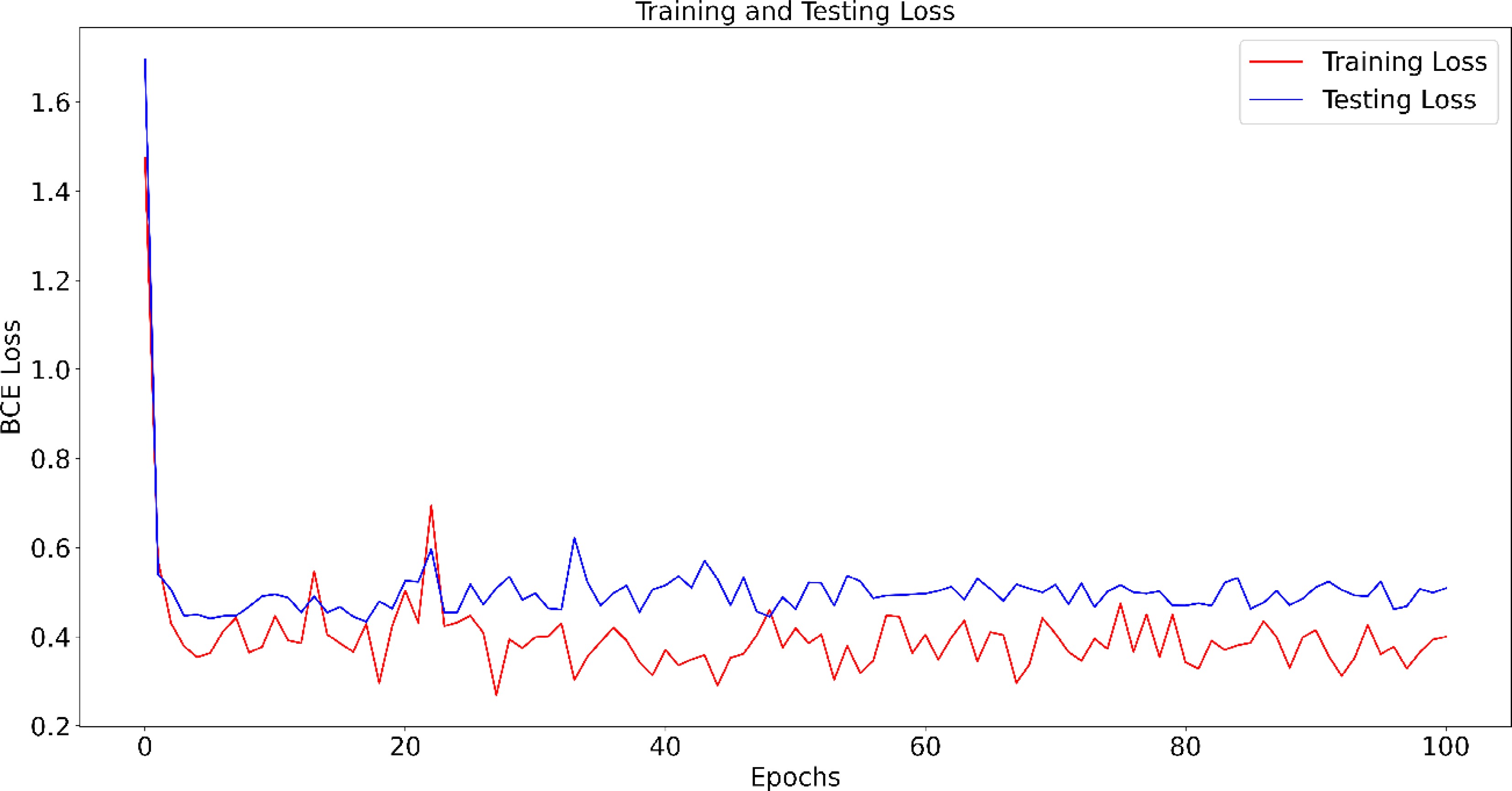
Figure 6.
Training and testing loss during training process.
-
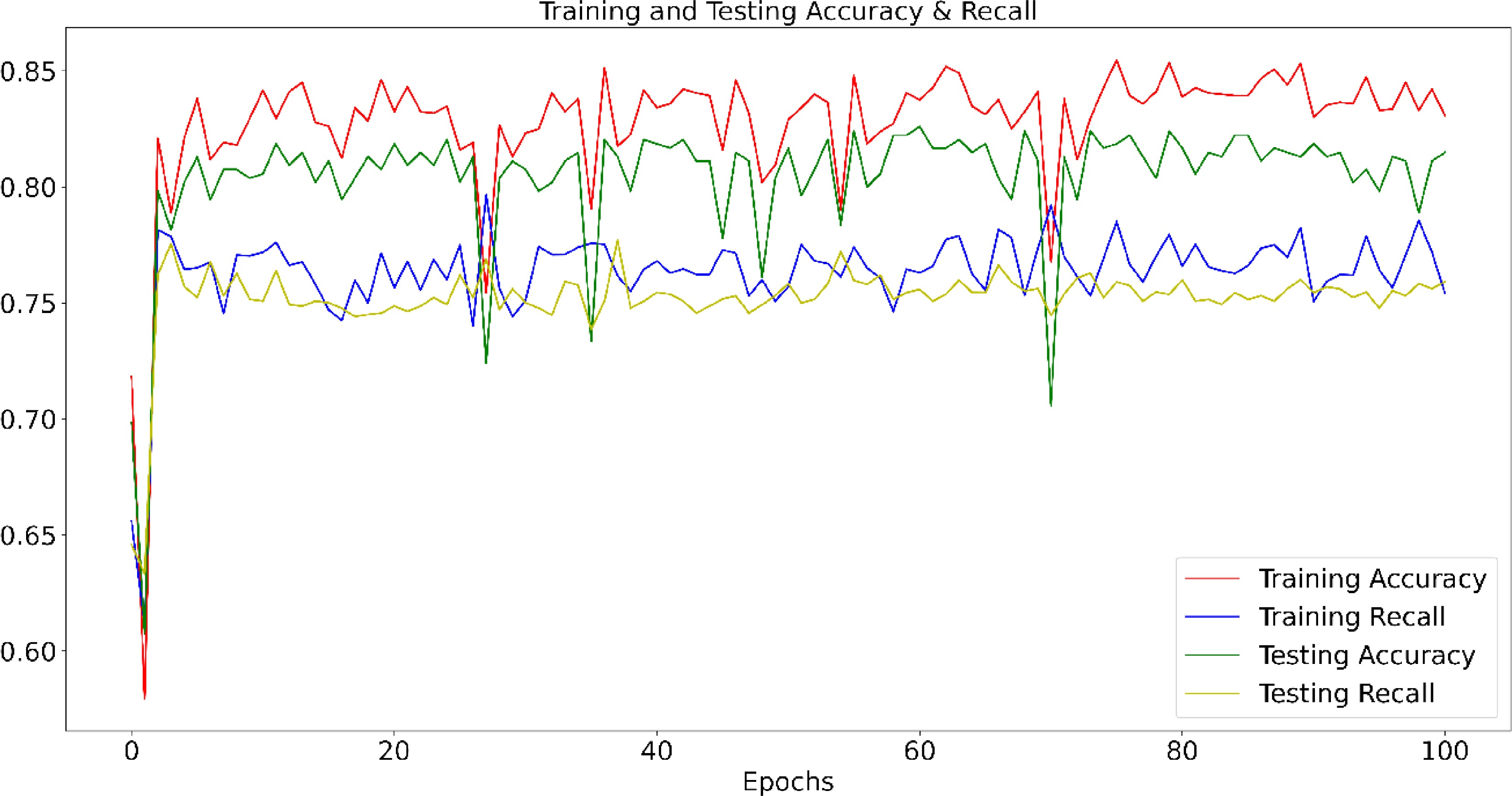
Figure 7.
Prediction accuracy and recall for training and testing datasets.
-
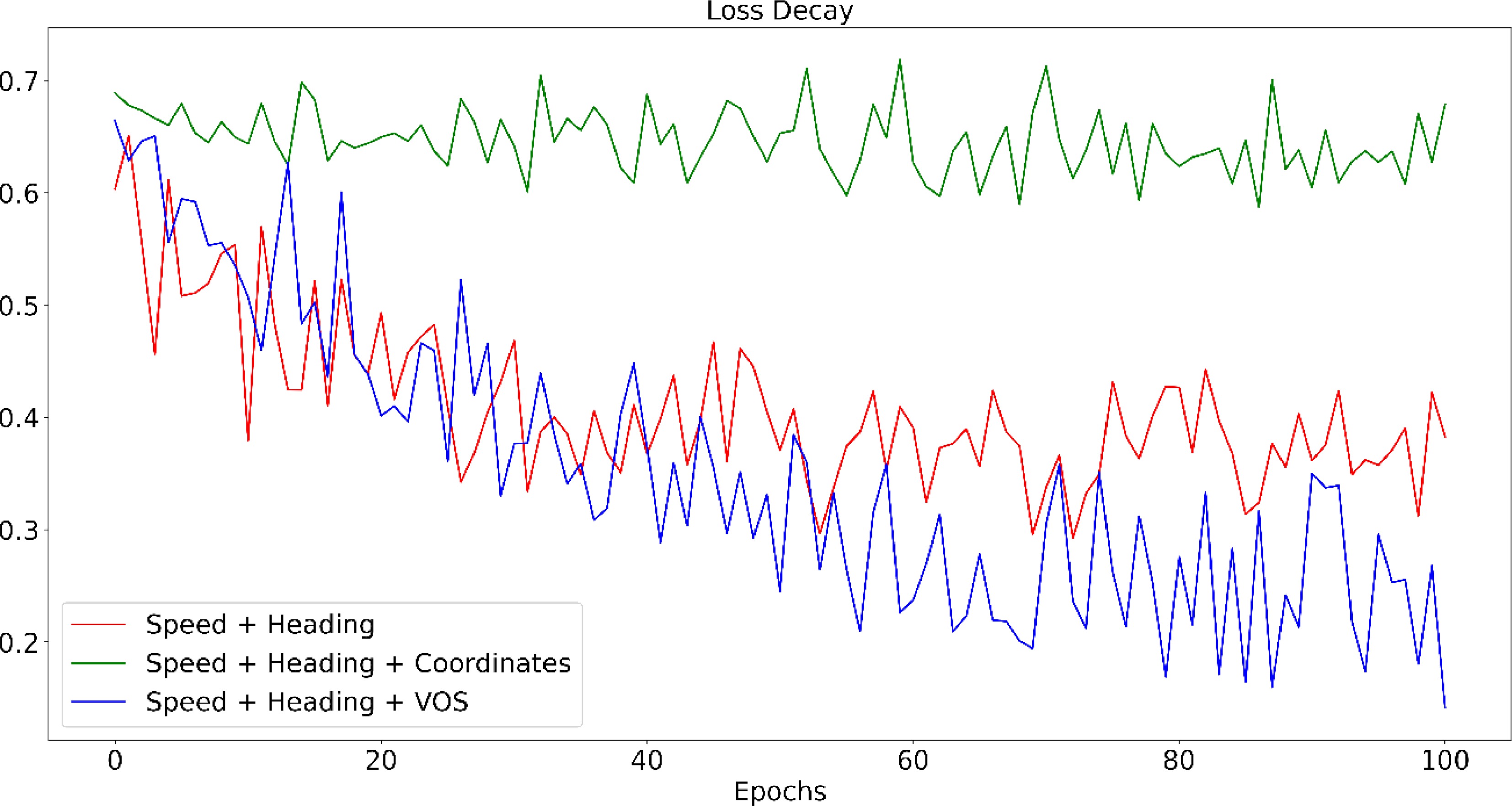
Figure 8.
Training loss decay for different feature combinations.
-
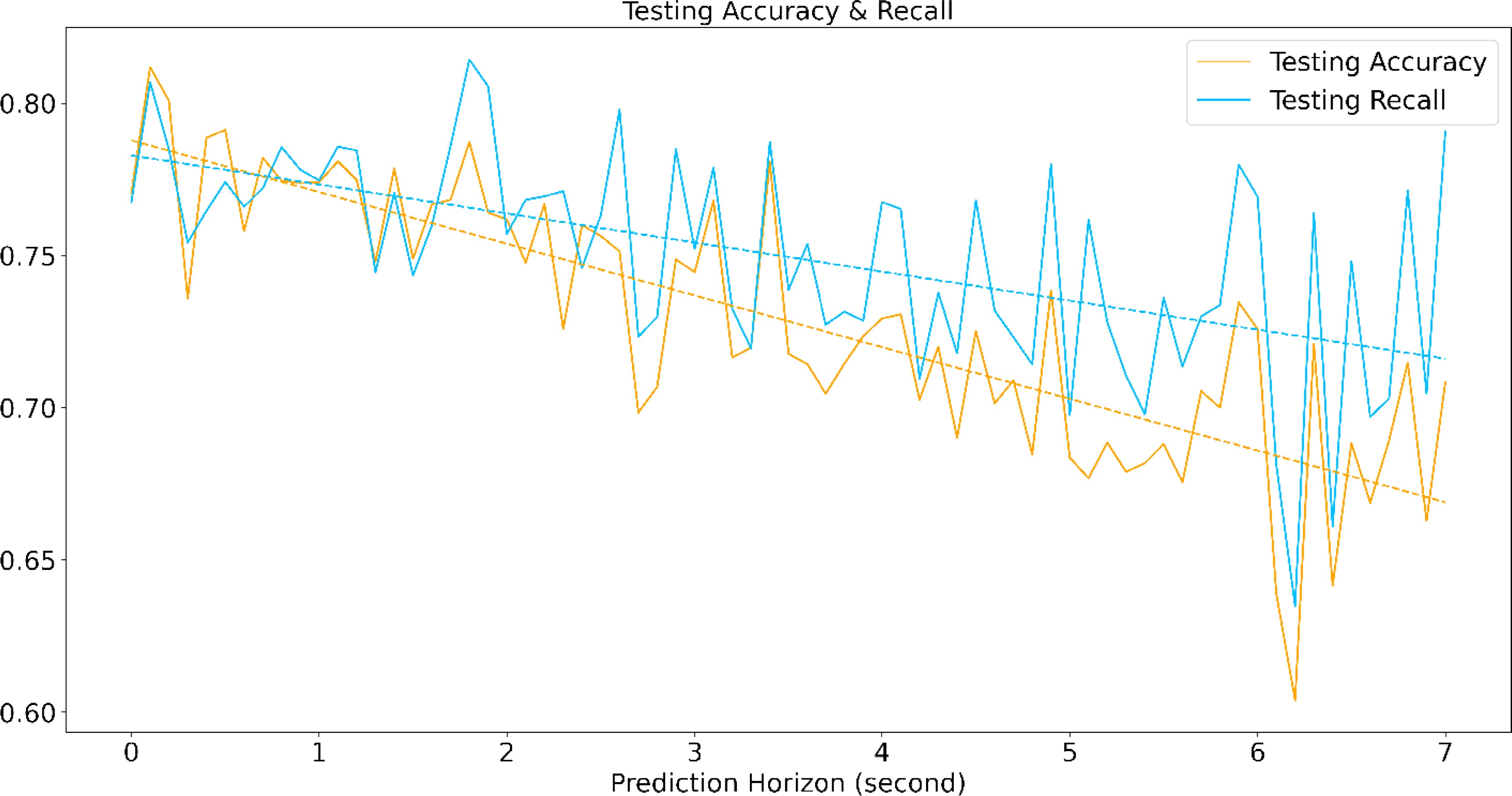
Figure 9.
Testing accuracy and recall for different prediction horizons.
-
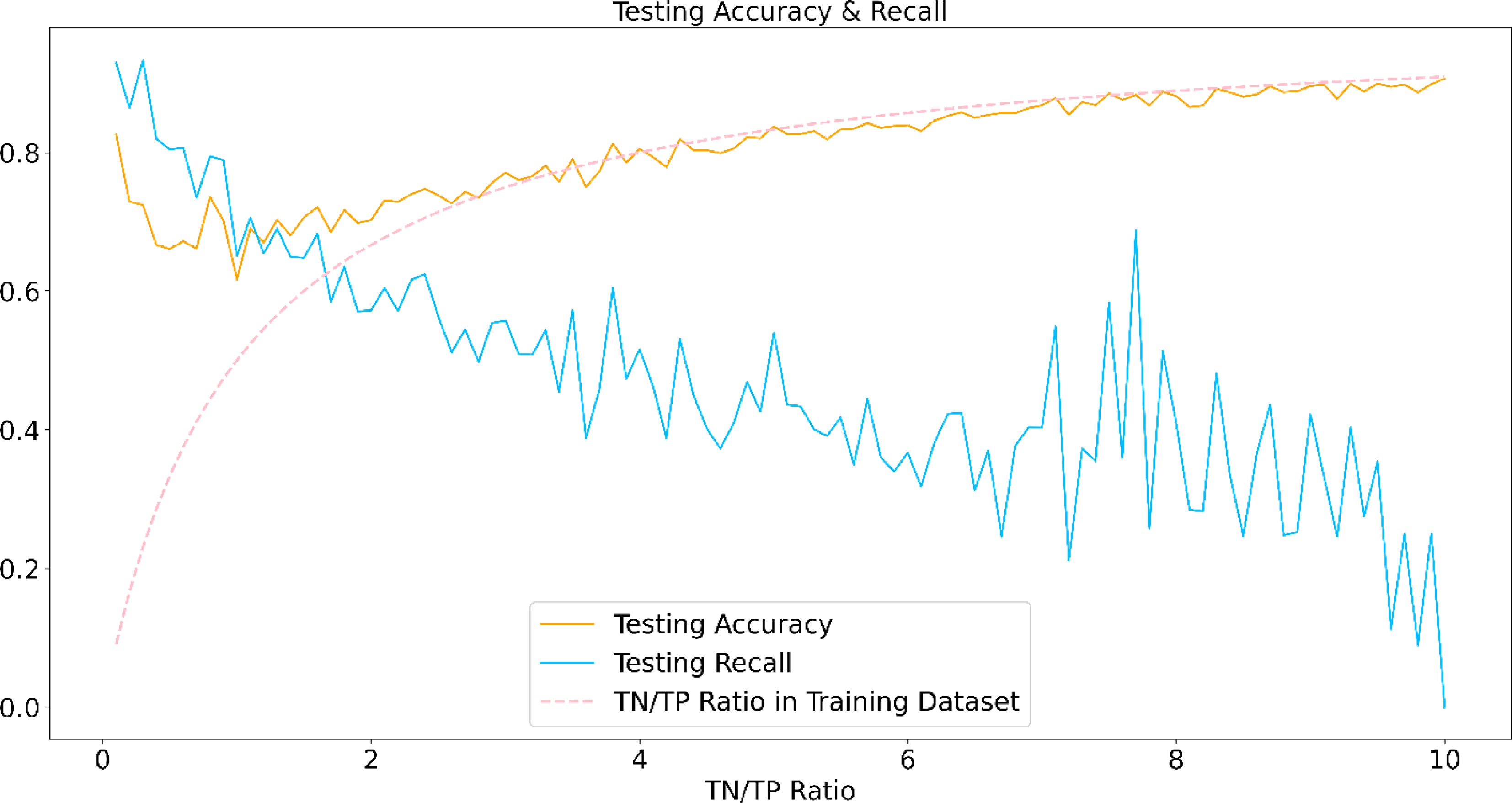
Figure 10.
Testing accuracy and recall for different data balancing.
-
Reference Methodology Contextual information Deo et al.[20] LSTM, CNN, Social Pooling Surrounding Vehicles Hou et al.[22] LSTM Surrounding Vehicles Kim et al.[28] LSTM Surrounding Vehicles Liu et al.[52] Stacked Transformer HD map,
Surrounding VehiclesMessaoud
et al.[54,55]Attention, LSTM, Social Pooling Surrounding Vehicles Gao et al.[56] VectorNet HD map,
Surrounding VehiclesZhao et al.[57] LSTM, CNN, Social Pooling Surrounding Vehicles, Satellite Image Zhao et al.[57]
Gu et al.[58]VectorNet, Goal-based Prediction HD map,
Surrounding VehiclesChoi et al.[59] Attention, LSTM - Lin et al.[60] Attention, LSTM - Table 1.
Summary of deep learning in trajectory and behavior prediction.
-
Hyperparameter Value Learning Rate 0.005 Number of Recurrent Layers 1 Number of features in hidden state 64 Batch Size 32 Number of Epochs 100 Threshold 0.5 Sequence Length 4 Selected Features Longitudinal speed,
Lateral Speed,
Heading, VOSTable 2.
Hyperparameter setup for the vanilla model.
-
Datasets Number of observation Accuracy Recall Training Set 1806 0.85 0.79 Testing Set 602 0.81 0.75 Validation Set 602 0.79 0.74 Table 3.
Model performance on training, testing, and validation datasets.
-
Feature selection Feature dimension Datasets Accuracy Recall Longitudinal Speed
Lateral Speed
Heading3 Training Set 0.81 0.80 Testing Set 0.79 0.79 Validation Set 0.77 0.75 Longitudinal Speed
Lateral Speed
Heading
Vehicle Coordinates5 Training Set 0.62 0.60 Testing Set 0.64 0.63 Validation Set 0.54 0.54 Longitudinal Speed
Lateral Speed
Heading
VOS11 Training Set 0.85 0.79 Testing Set 0.81 0.75 Validation Set 0.79 0.74 Table 4.
Model performance for different feature combinations
Figures
(10)
Tables
(4)