-
About this article
Cite this article
Cheah W C, Watson S A, Lennox B. 2019. Limitations of wireless power transfer technologies for mobile robots. Wireless Power Transfer 6(2): 175-189 doi: 10.1017/wpt.2019.8 

Limitations of wireless power transfer technologies for mobile robots
-
Author Bio:
 Wei Chen Cheah received his M.Eng. degree in mechatronics engineering at the University of Manchester in 2015. He is currently working toward his Ph.D. and is a research associate with the Robotics for Extreme Environment Group at the University of Manchester. His main research interests are mobile robots and wireless power transfer.
Wei Chen Cheah received his M.Eng. degree in mechatronics engineering at the University of Manchester in 2015. He is currently working toward his Ph.D. and is a research associate with the Robotics for Extreme Environment Group at the University of Manchester. His main research interests are mobile robots and wireless power transfer.  Simon Watson is a senior lecturer in robotic systems in the School of Electrical and Electronic Engineering at the University of Manchester. He obtained his M.Eng. in mechatronic engineering in 2008 and his Ph.D. in 2012, both from the University of Manchester. His research focus is on mobile robots for the exploration and characterization of hazardous and extreme environments and active areas of research include novel platform design, communications and localization and sensing and navigation. His current research portfolio includes developing submersible, wheeled, and legged robots for the nuclear industry (for the Sellafield and Fukushima sites) and aerial robots for the power generation industry (offshore wind).
Simon Watson is a senior lecturer in robotic systems in the School of Electrical and Electronic Engineering at the University of Manchester. He obtained his M.Eng. in mechatronic engineering in 2008 and his Ph.D. in 2012, both from the University of Manchester. His research focus is on mobile robots for the exploration and characterization of hazardous and extreme environments and active areas of research include novel platform design, communications and localization and sensing and navigation. His current research portfolio includes developing submersible, wheeled, and legged robots for the nuclear industry (for the Sellafield and Fukushima sites) and aerial robots for the power generation industry (offshore wind).  Barry Lennox is professor of applied control and nuclear engineering decommissioning in the Department of Electrical and Electronic Engineering at the University of Manchester and director of the Robotics and Artificial Intelligence for Nuclear (RAIN) Research Hub. He is an expert in applied control and its use in robotics and process operations and has considerable experience in transferring leading edge technology into industry. He is the research lead for the nuclear engineering decommissioning theme within the Dalton Nuclear Institute and the Robotics in extreme environments theme within the School of Electrical and Electronic Engineering. He leads the EPSRC Programme Grant: Robotics for Nuclear Environments and the robotics work within the EPSRC TORONE project
Barry Lennox is professor of applied control and nuclear engineering decommissioning in the Department of Electrical and Electronic Engineering at the University of Manchester and director of the Robotics and Artificial Intelligence for Nuclear (RAIN) Research Hub. He is an expert in applied control and its use in robotics and process operations and has considerable experience in transferring leading edge technology into industry. He is the research lead for the nuclear engineering decommissioning theme within the Dalton Nuclear Institute and the Robotics in extreme environments theme within the School of Electrical and Electronic Engineering. He leads the EPSRC Programme Grant: Robotics for Nuclear Environments and the robotics work within the EPSRC TORONE project - Corresponding author: Wei Chen Cheah, Department of Electrical and Electronic Engineering, The University of Manchester, Manchester, United Kingdom of Great Britain and Northern Ireland. Email: wei.cheah@manchester.ac.uk
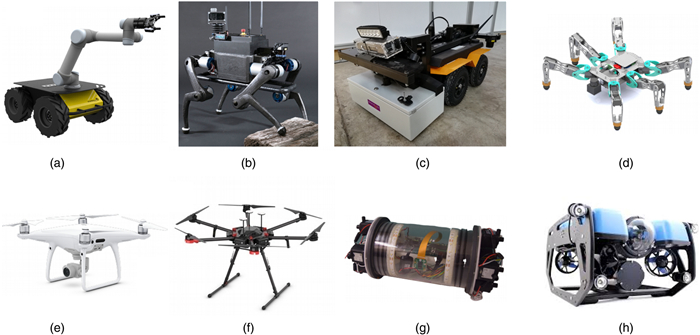
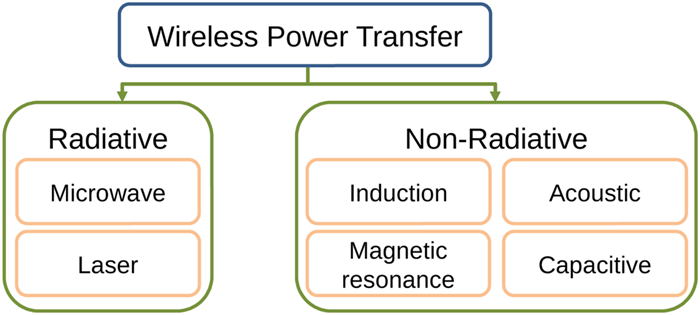
Abstract: Advances in technology have seen mobile robots becoming a viable solution to many global challenges. A key limitation for tetherless operation, however, is the energy density of batteries. Whilst significant research is being undertaken into new battery technologies, wireless power transfer may be an alternative solution. The majority of the available technologies are not targeted toward the medium power requirements of mobile robots; they are either for low powers (a few Watts) or very large powers (kW). This paper reviews existing wireless power transfer technologies and their applications on mobile robots. The challenges of using these technologies on mobile robots include delivering the power required, system efficiency, human safety, transmission medium, and distance, all of which are analyzed for robots operating in a hazardous environment. The limitations of current wireless power technologies to meet the challenges for mobile robots are discussed and scenarios which current wireless power technologies can be used on mobile robots are presented.
-
Key words:
- Robotic applications /
- Resonant magnetic /
- Laser /
- Microwave