








-
In recent years, China's road traffic safety has gradually improved, but traffic accidents involving pedestrians, cyclists and other vulnerable road users still maintain a high number and proportion. According to the statistics of the National Bureau of Statistics of China, there were 29,969 non-motor vehicle traffic accidents in China in 2020, including 4,373 deaths and 33,636 injuries. The direct property loss of non-motor vehicle traffi c accidents amounted to 62.71 million Chinese Yuan. In 2020, there were 2,611 bicycle and 3,480 pedestrian traffic accidents respectively[1]. The prevention of vehicle collision VRU traffic accidents needs to be highly valued by society.
In developed countries such as Europe and the United States, the main type of VRU is pedestrians, and the vehicle active safety system for pedestrian protection has been extensively researched[2]. The active safety system is mainly used to remind the driver to brake in time or the system will automatically avoid collision when there is a risk of collision in front of the vehicle. In recent years, major automobile companies and component suppliers have launched active safety systems for pedestrian protection. However, in China's complex mixed road traffic environment, the behavior characteristics of VRU are different from those of Europe, America and other countries, mainly including the following characteristics: 1) There are a wide range of targets, including pedestrians and cyclists (including different riding tools, such as bicycles, electric bicycles, motorcycles and tricycles); 2) Weak safety awareness, frequent violations such as running red lights, going in a direction not allowed by traffic regulations, carrying people and entering the motorway illegally; 3) Clusters appear, target motions are changeable, and individual behaviors are highly random and uncertain[3]. These unique behavioral attributes of Chinese VRUs make it difficult for the existing active security system to quickly and accurately achieve multi-target perception, behavioral cognition and risk decision-making. Statistical studies of traffic accidents have shown that VRUs are prone to injury in crashes relative to the passengers inside cars, in which VRU's low awareness of traffic regulations is often closely related to causing major accidents[4, 5].
In order to better protect VRUs in road traffic systems, this paper provides insight into current perception, decision-making and vehicle active safety collision avoidance for VRUs, carried out literature research, and used the scientific metrology method of knowledge map to deeply analyze the research status at home and abroad. This paper summarized the research status and characteristics, and further explored the future development direction and research focus.
-
CiteSpace and Vosviewer are two scientific and complementary analysis software of statistical methods, which are widely used in bibliometrics. CiteSpace is based on co-citation analysis theory and path finding network algorithm and other methods to conduct co-citation and coupling analysis of literature, research network cooperation analysis, theme and domain contribution analysis and so on[6]. In CiteSpace, this study sets the year of time zone segmentation as 2000−2022, and the length of time span segmentation as one year; the term is selected as highlighted term; the node type is selected as the keyword.
Vosviewer, based on the principle of co-citation and co-citation of literature, constructs and displays the knowledge map by using the difference in size, density and distance between nodes to evaluate the change of research direction and hot spots in the discipline field[7]. In Vosviewer, this study sets the type of analysis as co-occurrence analysis, and selects key words, organizations, and full counting. The words with a frequency of more than 10 times are high-frequency words, showing research hotspots.
Literature classification survey
-
In the context of the new four modernizations of automobiles, namely, 'intelligence, networking, sharing and electrification', intelligent automobiles have attracted more and more researchers' attention. The emergence of intelligent vehicles provides a new and powerful means for VRU's traffic safety assurance. In order to better adapt to the current complex traffic participation environment, researchers have carried out a lot of research around the three core dimensions of perception, cognition and decision-making, so that intelligent vehicles can better serve us. However, there are also some major problems to be solved, such as: failure of automatic collision avoidance system, inaccurate identification mode, ethical conflict of intelligent decision-making, etc.
In the literature retrieval, we chose to use the literature database to sort out the development of intelligent vehicle collision avoidance decision-making system. In the selection of databases, there are mainly web of science, Journal Citation Reports, Engineering Village, Institute of Electrical and Electronics Engineers and other databases commonly used by researchers. In this study, the web of science core collection (WOSCC) database is selected for literature retrieval, which has collected more than 12,000 world authoritative and influential academic journals. The journal collection is relatively comprehensive, which can ensure the objectivity and universality of the retrieval and mining literature to the greatest extent[8]. This study used the WOSCC as the data source. Keywords 'vulnerable road user', 'perception', 'cognitive', 'decision making' and 'vehicle' were searched, so were extended terms including 'pedestrian', 'bicyclist', 'cyclist', 'motorist', 'moped ride', 'trajectory prediction', 'trace', 'car', 'automo', 'avs'. The search route was subject term search, and the initial search result was n = 1,001. The search was restricted to literature from 2000 to 2022. The final search result was n = 846 after excluding less representative literature such as conference abstracts, letters, and literature that clearly digress from the subject. The search formula was TS = (('vulnerable road user' OR 'pedestrian' OR 'bicyclist' OR 'cyclist' OR 'moped rider' OR 'motorist') AND ((perception) OR ('cognitive' OR 'trajectory prediction' OR 'trace') OR ('decision making')) AND ('vehicle' OR 'car' OR 'automo' OR 'avs')). Vosviewer and citespace document analysis software are used to mine and analyze data from changes in the number of articles issued, inter-country cooperation, research institute cooperation, keyword co-occurrence, keyword burstness and other methods. We aimed to understand the research focus of scholars on perception, cognition and decision-making of intelligent vehicles, summarize the achievements that researchers have made in the field of VRU collision avoidance strategies, analyze the deficiencies in the current research results, and discuss and summarize problems in combination with multidisciplinary development, so as to promote the progress of research on VRU collision avoidance strategies. The basic workflow of this study is shown in Fig. 1.
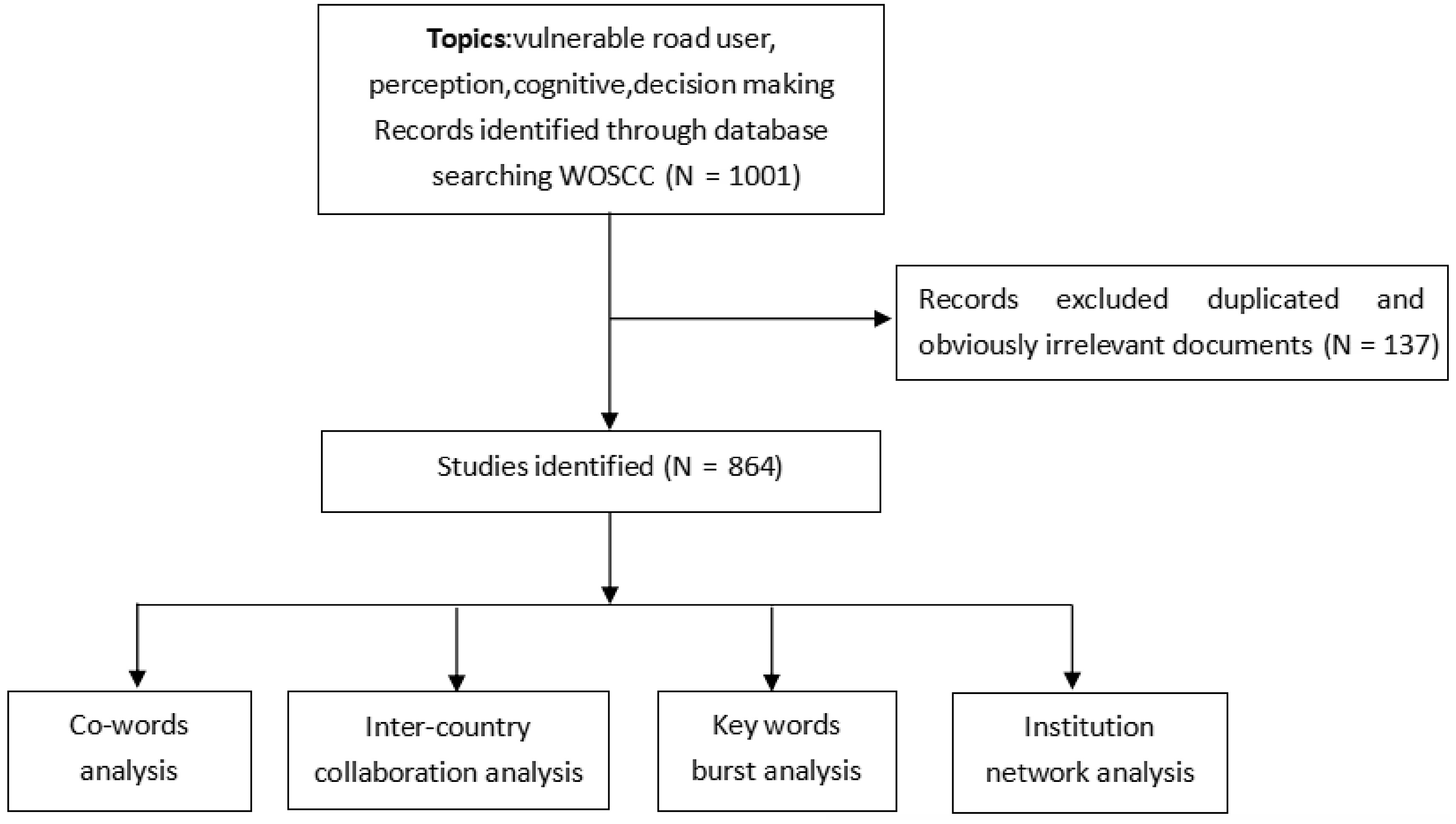
Figure 1.
Workflow diagram of research.
-
In the past five years, with the development of 5G, Internet of Things, big data and other technologies, the perception, cognition and decision-making of intelligent vehicles have attracted increasing attention from scholars. The number of related articles has also steadily increased in recent years, in which behavioral perception and decision making have received close attention. Relatively few studies related to behavioral cognition have been conducted, but the number of research articles issued in the last five years has also increased significantly relative to the 18 years from 2000−2017, as shown in Fig. 2.
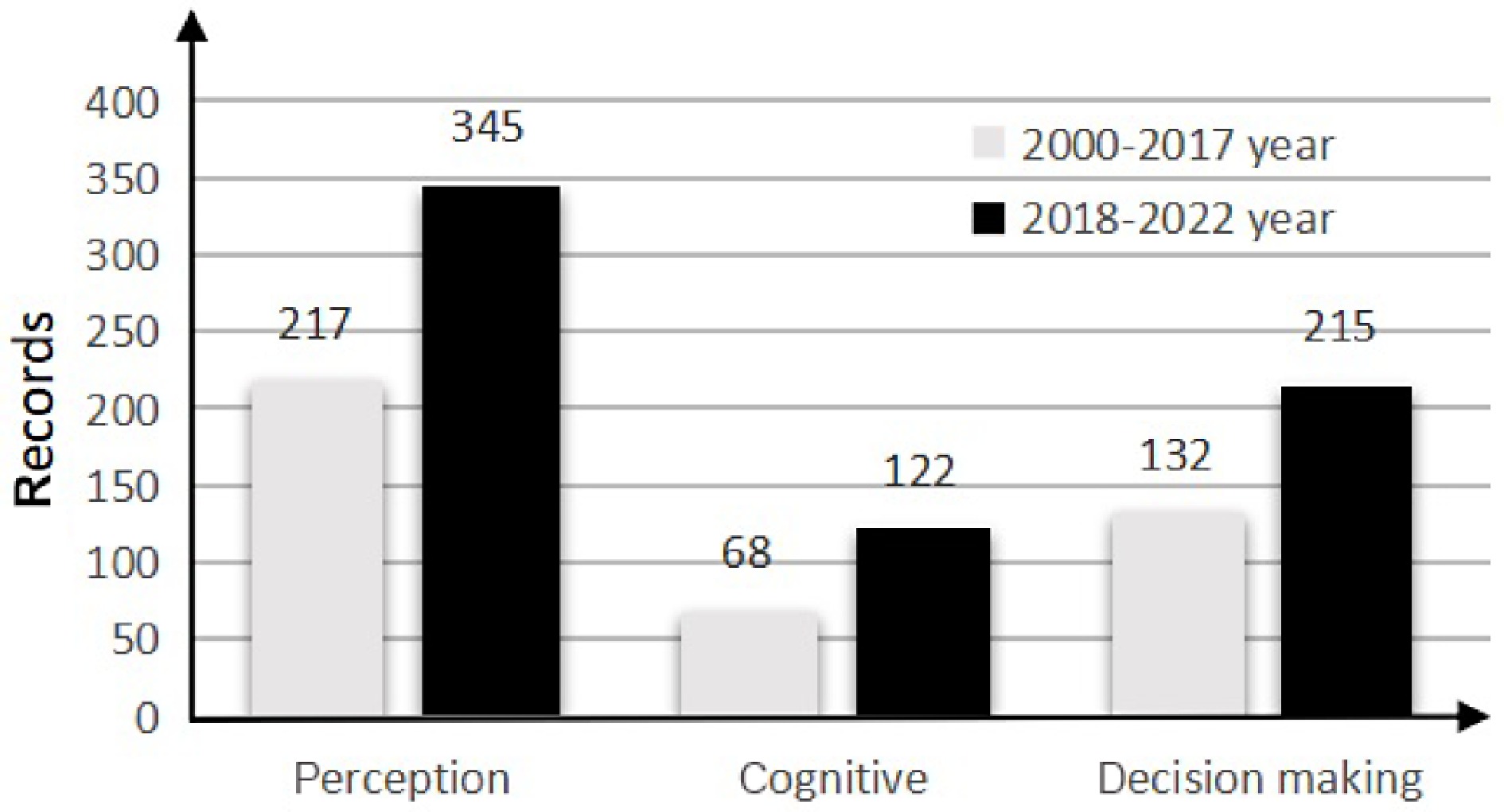
Figure 2.
Comparisons of number of research articles.
The inter-country collaboration network map
-
There are many countries that have conducted research in the field of VRU collision avoidance decision making. Among them, China and the United States carry out the majority of the research. China is the world's largest research country in terms of research quantity, but the United States has conducted more extensive international cooperation, including the closest cooperation with China and Canada. In addition to a large number of international collaborations with the United States, China has also conducted a large number of collaborative research studies with Australia and Germany, as shown in Fig. 3.
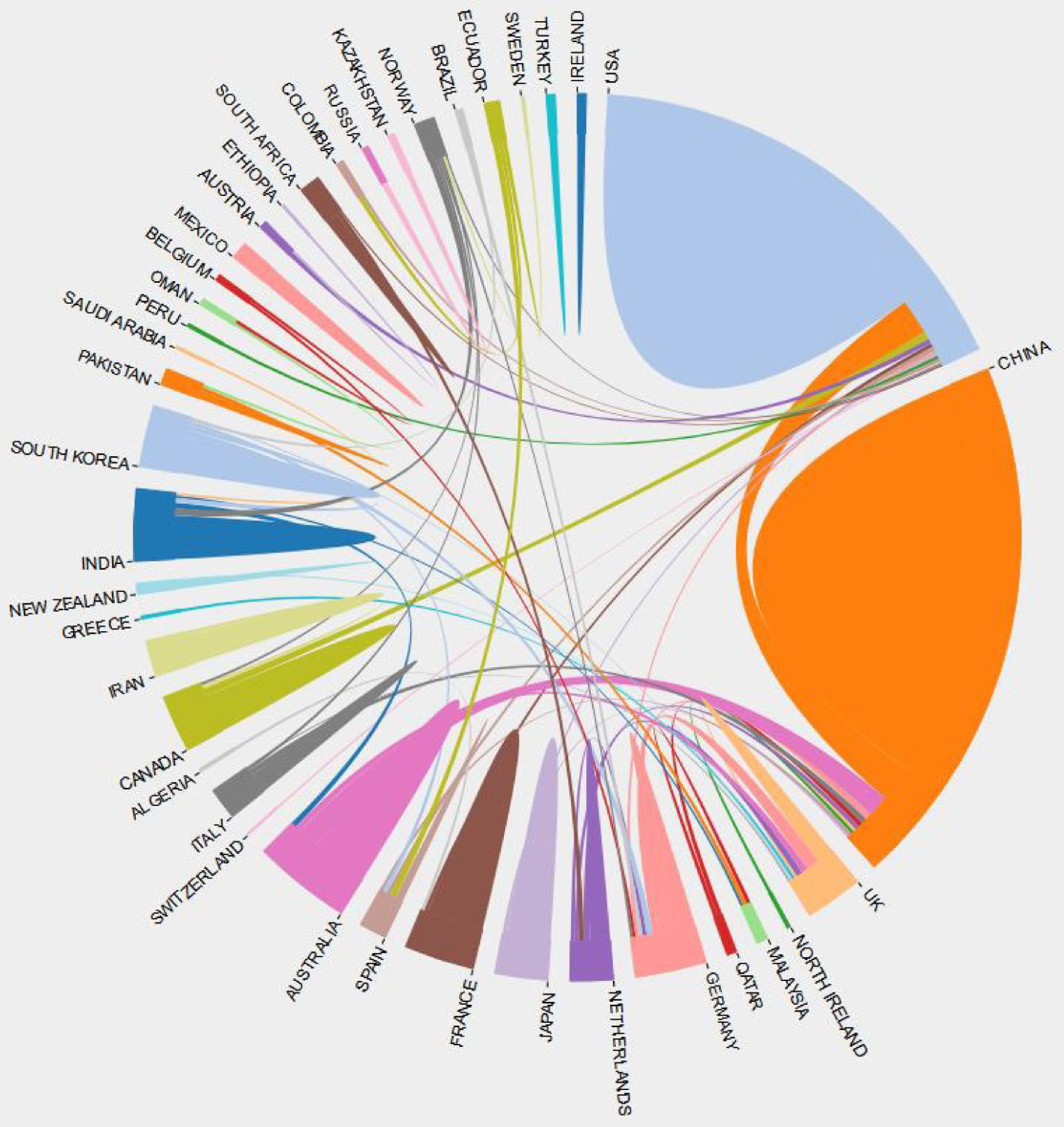
Figure 3.
Inter-country collaboration network map.
The institution network map
-
In the institution collaboration network analysis, the links between nodes represent cooperation. The wider the links, the closer the cooperation. Figure 4 shows the cooperation network among cooperating institutions. Each node represents an organization. The size of the node indicates the number of papers published. In China, Tongji University, Tsinghua University, Southeast University, Beijing University of Technology, Beijing Jiaotong University, Wuhan University, Chang'an University, Southwest Jiaotong University, and other closer cooperation, has a high influence. In foreign countries, Delft University of Technology, Technical University of Munich, The University of Queensland, Monash University, The University of British Columbia, The University of Tokyo all have strong influence in the field of VRU and cooperate closely with other institutions.
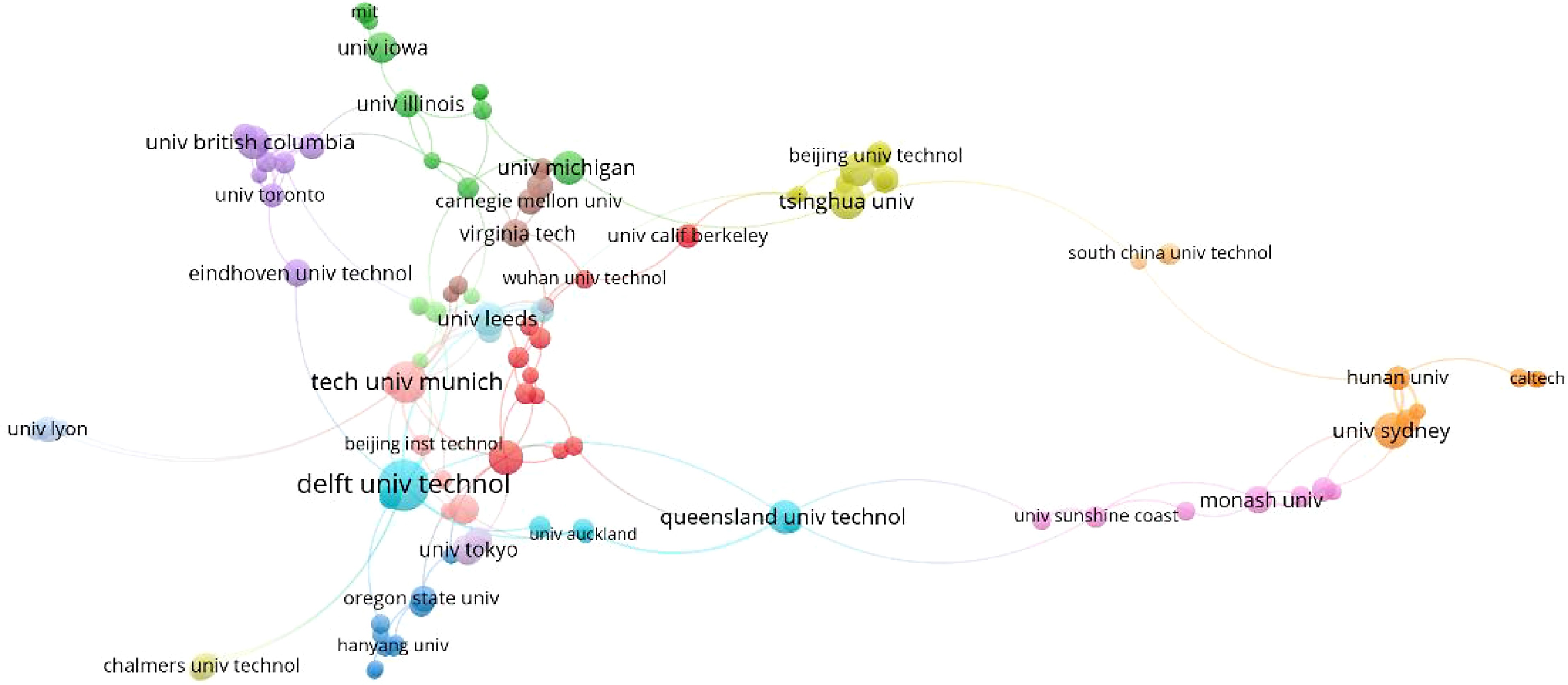
Figure 4.
Cooperation network among research institutions.
Co-word analysis
-
According to Fig. 5, through the keyword co-occurrence study of smart car perception-cognition-decision related articles, we found that VRU and smart car collision avoidance research mainly focused on risk perception, traffic participant behavioral state cognition, and computer analysis decision making using algorithms for collision avoidance decision making and path selection. Among them, behavioral perception, as the branch with the largest number of articles, has made more in-depth research on perception, such as: whether pedestrians are walking, pedestrian gender, and the details of different environments they are in.[9] The use of emerging deep learning, virtual reality technology and other powerful technical support for VRU collision avoidance decision research[10−12].
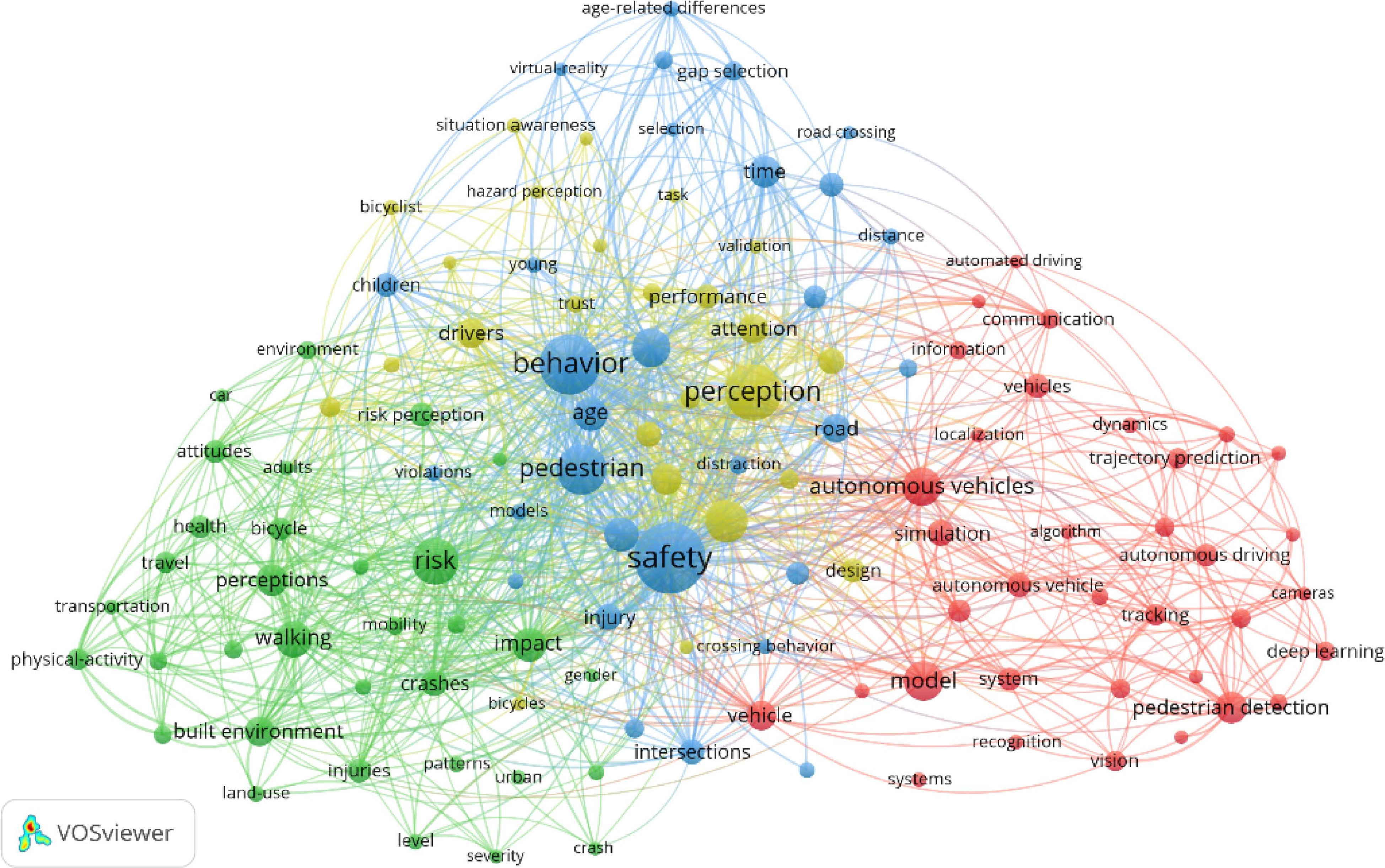
Figure 5.
Document keyword co-occurrence of smart car perception-cognition-decision documents.
Key words burstness analysis
-
Through the analysis of keyword burstness in Fig. 6, it can be found that the research hotspots in the field of VRU at this stage have shifted from the injury severity course and VRU personal characteristics such as VRU physical activity and age gap to the current emerging deep learning[13]. Through deep learning to continuously optimize the model, so that the system model keeps pace with the times and promotes the transformation of human-computer interaction to be more intelligent, more efficient and more convenient. Secondly, researchers have paid more attention to VRU studies at signalized intersections and crossings, where traffic accidents are common. For the factors of transportation environment, which often receives the attention of researchers. Finally, the emergence of virtual reality technology has provided important technical support for traffic accident reconstruction, understanding of traffic involvement process, and development of automated driving, providing a broad platform for VRU collision avoidance decision research[14].
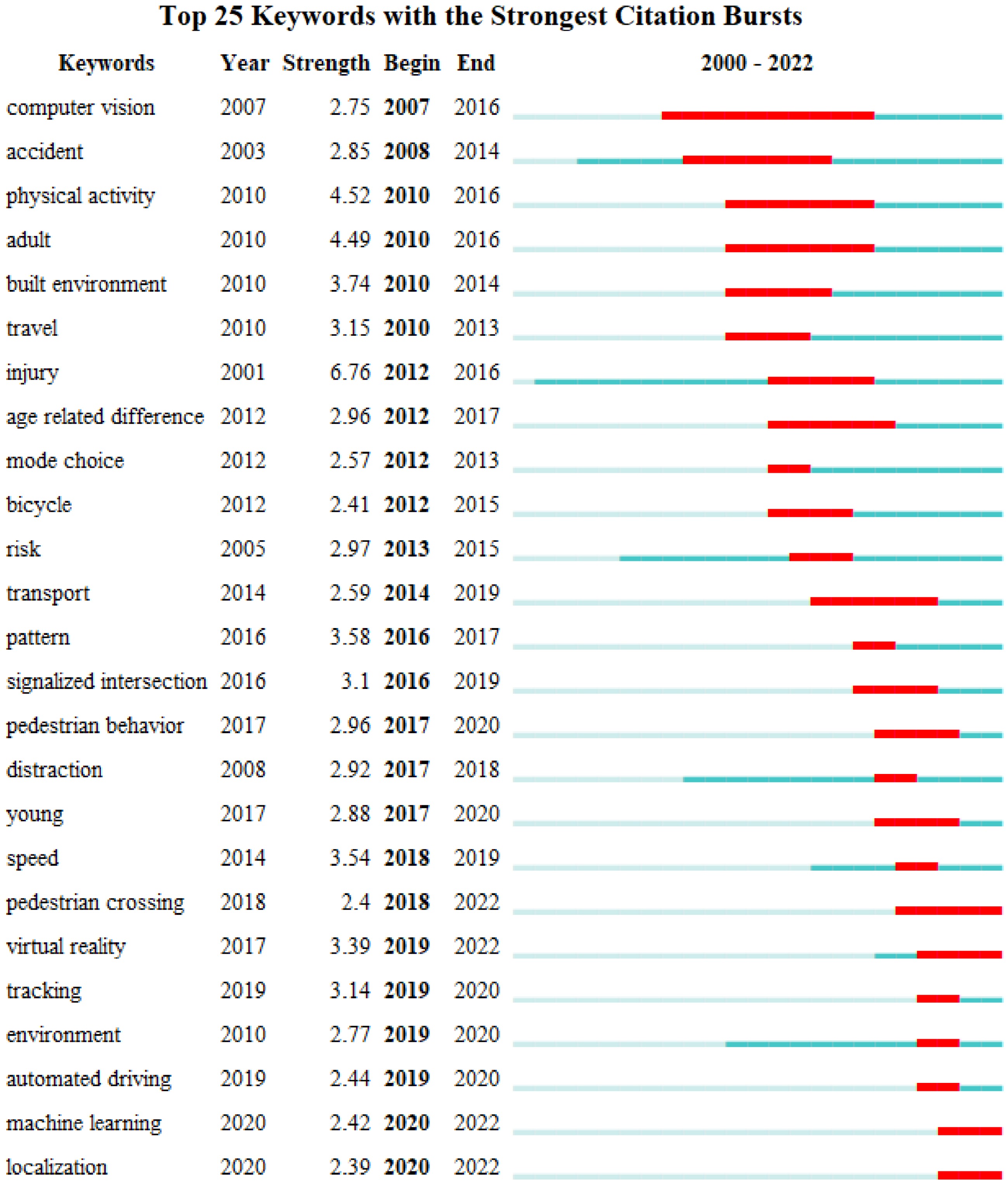
Figure 6.
VRU keyword burstness analysis.
-
The vehicle active safety system for pedestrian and cyclist protection involves complex VRU perception technology, VRU behavior characteristics analysis and driving risk decision-making method considering VRU behavior characteristics. A lot of research work has been carried out at home and abroad. The current situation and development analysis are introduced below.
Perception research
-
In terms of VRU perception, effective perceptual interaction rules and algorithm models should be built between vehicles and VRUs to adapt to complex, dynamic and uncertain traffic environments. And VRU detection, VRU extraction and VRU action recognition are the main key points and difficulties in the current research process. The traditional detection research on pedestrian and cyclist considers the two separately, and pedestrian detection algorithms can be divided into two categories according to the development time. One is the detection algorithm based on traditional manual features. The representative algorithms are the Histogram of Orientated Gradients (HOG) pedestrian detection algorithm, Support Vector Machine (SVM) method, Deformable Part Model (DPM) and pedestrian detection based on action features. Liu et al. proposed a multi pose pedestrian detection method based on a posteriori HOG feature to classify pedestrians and background[15]. However, such algorithms generally have the problems of poor real-time performance and high leak detection rate in the complex background environment. Chen et al. compared and analyzed the pedestrian detection effect based on HOG and SVM, and the detection accuracy decreased significantly when the human body was occluded. But the DPM algorithm can effectively improve the detection accuracy in this case[16]. The second type is the detection algorithm based on deep learning. This algorithms can be divided into detection algorithm based on target candidate frame and detection algorithm based on integrated convolutional network. The representative algorithms of the former are Faster Regions with Convolutional Neural Network (Faster R-CNN) algorithm, spatial pyramid pooling network (SPPNet), Fast R-CNN and methods represented by Faster R-CNN based on candidate box. Yin et al. summarized the method of real-time pedestrian detection framework based on Faster R-CNN to achieve rapid pedestrian detection[17]. Although these methods improve the real-time performance of detection, there is still a problem of missing detection. The representative algorithms of the latter are You Only Look Once (YOLO) and Single Shot MultiBox Detector (SSD). Hu et al. took the YOLOv2 network as the basic model of target detection, and added residual network in YOLOv2 to improve the accuracy of model detection of small target clusters, and they formed YOLO-R network, trained a network model more suitable for detecting pedestrian and cyclist targets, and completed effective classification of pedestrians and cyclists through matching algorithm[18]. Bai et al. established the Advanced Driving Assistance System (ADAS) real-time pedestrian detection model YOLOv2-P based on the deep neural network model YOLOv2 to solve the problem of low detection accuracy of vehicles for pedestrians with complex backgrounds and small sized pedestrians[19]. Chen et al. proposed a multi task joint detection algorithm based on SSD to realize pedestrian detection and distance detection at once[20]. This kind of method has some problems, such as model convergence difficulty and poor target detection effect. However, the above method based on candidate box and regression has both advantages and disadvantages in target detection for pedestrians and cyclists, and it is difficult to meet both the requirements of detection accuracy and efficiency.
The ideal pedestrian and cyclist detection model should meet the requirements of low time delay, high accuracy and high efficiency. It not only includes the positioning accuracy, detection accuracy and classification accuracy, but also includes the time efficiency, storage efficiency and memory efficiency. However, at present, the relevant algorithms and models are still in the academic research stage, and there is still a certain gap from the actual application of driverless vehicles. The joint detection technology for pedestrians and cyclists in actual complex scenes and special environments still needs to be explored and broken through. The detection of cyclists is similar to that of pedestrians, but because the ratio of height to width of cyclists varies greatly from different perspectives, many different models are generally used to detect cyclists. At present, there is little research on the detection of cyclists, mainly due to the lack of data sets for them[21]. Li et al. proposed a crossing cyclist detection method based on SVM classifier for a monocular vision system installed on a moving vehicle, and proposed the HOG-LP (Histogram of Oriented Gradient-Light sampling and Pyramid sampling) method to overcome the drawbacks of general HOG feature extraction for crossing cyclist detection[22]. This classification method has low real-time performance and cannot be widely used. Therefore, Cho et al. propose a multi view pedestrian detection model by using the Deformable Part Model (DPM)[23,24]. Although the detection efficiency has been improved, the stability and universality of the detection model are poor. Later, Yang et al. proposed a multi-level cyclist and background classification method based on the Extreme Learning Machine (ELM)[25]. Although to some extent it solves the problem of high rate of missed detection, this method is still controversial. Tian & Lauer established the geometric relationship between the size of the target and the position of the image through regression method, and used the cascade classifier of multi view model to achieve the distinguish of cyclists' targets[26]. The detection efficiency of this method is very high, but there is a problem of high false detection rate. Shao et al. established a bicycle riding behavior recognition model based on Convolutional Neural Network (CNN). Considering the characteristics of model input features and the complexity of classification tasks, they iteratively designed and optimized the model structure, which can effectively identify bicycle riding behavior in different scenarios[27]. It can be seen that the problems of missed detection and high false detection rate exist more or less in the separate detection of pedestrians and cyclists. Moreover, the combined detection method is difficult to effectively learn the differences between pedestrians and motorists, which will lead to classification confusion between the two, and the problem of detecting cyclists as pedestrians or pedestrians as cyclists will arise.
In recent years, with the development of deep learning technology and the increasing complexity of object classification, the academic community has begun to build a challenging universal object detection system. In 2012, Krizhevsky et al. proposed a new deep neural network AlexNet[28] in a large-scale visual recognition challenge. Since then, the research focus of many computer vision applications has been focused on deep learning methods. After that, many methods based on deep learning appeared in the detection of general objects, and made good progress. Lin et al. first proposed to use the focus loss function to train the general target detector based on Faster R-CNN, which improved the target detection accuracy[29]; then, based on Faster R-CNN, a feature pyramid networks (FPN) detection algorithm is proposed, which has obvious advantages for small target detection[30]. Xu et al. proposed a pedestrian detection network PVDNet based on deep learning. Through nested cross level connection, gradient can be better back-propagated, which can effectively accelerate the convergence speed and accuracy of pedestrian detection models[31].
The sensors used to identify VRUs include visual sensors and laser radar sensors. Because the vehicle mounted visual sensors change the pedestrian scale rapidly in the video and update the scene quickly with the movement of the vehicle, autonomous vehicles put forward higher requirements for real-time dynamic detection of pedestrians. Li et al. proposed a relevant filtering framework based on background perception, and established a fast estimation and selective update algorithm for the pedestrian scale in the moving state. Compared with the Kalman pedestrian tracking algorithm, it has better scale adaptability[32]. In addition, the industry has gradually developed the use of laser radar sensors for pedestrian detection. Fan et al. have designed a pedestrian recognition algorithm based on KDTree and European clustering for the laser radar point cloud data combined with the geometric and physical characteristics of pedestrians, which can significantly reduce the amount of neighbor search calculation, significantly accelerate the European clustering effect, and effectively detect pedestrian status[33].
Table 1 is a summary of current perception research. In summary, accurate recognition of pedestrians and cyclists in complex environments is a major demand for VRU perception. Because the subjects of pedestrians and cyclists are similar, a common joint detection framework is used, and the differences between them are obtained through deep learning. However, the existing methods still have the problems of low recognition accuracy and classification confusion.
Table 1. Summary of perception research.
Classification List of research content The traditional detection research on pedestrian and cyclist (pedestrian
detection algorithms)Based on traditional manual features:
Histogram of Orientated Gradients (HOG) pedestrian detection algorithm, Support Vector Machine (SVM) method, Deformable Part Model (DPM) and pedestrian detection based on action features.Detection algorithm based on deep learning:
1. Detection algorithm based on target candidate frame: Faster Regions with Convolutional Neural Network (Faster R-CNN) algorithm, SPPNet, Fast R-CNN and methods represented by Faster R-CNN based on candidate box.
2. Detection algorithm based on integrated convolutional network: You Only Look Once (YOLO) and Single Shot MultiBox Detector (SSD)The joint detection technology 1. Detection method based on SVM classifier for a monocular vision system and HOG-LP (Histogram of Oriented Gradient-Light sampling and Pyramid sampling) method.
2. Deformable Part Model (DPM) multi view pedestrian detection model.
3. Multi-level cyclist and background classification method based on the Extreme Learning Machine (ELM)
4. Cascade classifier of multi view model.
5. Bicycle riding behavior recognition model based on Convolutional Neural Network (CNN)Universal object detection system 1. Deep neural network AlexNet in a large-scale visual recognition challenge.
2. The general target detector based on Faster R-CNN trained by using the focus loss function.
3. Pedestrian detection network PVDNet based on deep learning.
4. Relevant filtering framework based on background perception.
5. Pedestrian recognition algorithm based on KDTree and European clustering for the laser radar point cloud data combined with the geometric and physical characteristics of pedestrians.Behavioral cognitive research
-
In terms of VRU behavior cognition, according to different goals, VRU motion prediction is often divided into behavior prediction and trajectory prediction. Behavior prediction mainly estimates the intention of VRU and predicts the movement state in the future. According to the prediction duration, the trajectory prediction methods can be divided into short-term prediction and long-term prediction. Specifically, short-term trajectory prediction focuses on predicting the speed change sequence and position change sequence of pedestrians and cyclists in a relatively short period of time. The prediction time is usually less than 2.0 s, which is closely related to vehicle safety collision avoidance; long-term trajectory prediction focuses more on the prediction of the speed and location in the future over a period of 2.0 s. It is often used for path selection research and is closely related to vehicle behavior and path planning.
Common behavior prediction models can be classified into micro models and individual behavior models. The micro model focuses on the relationship between the movement of individual pedestrians and cyclists and the surrounding pedestrians or cyclists. Gipps & Marksjo proposed a Benefit Cost Cellular Model, which allocates a grid to each pedestrian, assigns a certain value according to the location relationship with pedestrians in the nearby grid, calculates the net income, and simulates pedestrians to move in the direction of the highest income[34]. Matsushita & Okazaki proposed a Magnetic Force Model, which simulates the relationship between microscopic pedestrians with magnetic force, sets pedestrians and target sites as anodes and cathodes, and describes pedestrian behavior according to force conditions[35]. However, the micro models are mainly based on hypothesis, and there is still a gap between them and the actual data, so they are not practical enough. Models of individual behavior include the Markov chain model, fuzzy logic model and support vector machine. This model mainly starts from the movement intention of pedestrians or cyclists, not only considering the impact of the surrounding environment on people. The Markov chain model discretizes the pedestrian motion state into a finite number of state variables, and studies the switching relationship between different state variables. Kwak et al. established a corresponding probability density function to estimate the state switching probability by using the fuzzy logic theory model and taking the relationship between pedestrian actions and traffic elements such as road edges as the fuzzy characteristics. This method shows good intention prediction ability in the verification of measured data[36]. Fedy & Mounir used Ripley's K algorithm to study various subtype factors of VRU collision. The algorithm showed that the spatial clustering pattern of VRU collision accidents on the time scale showed a random trend, and the sudden change of the direction of its motion track and dangerous overtaking increased the probability of fatal accidents compared with other factors[37]. Koehler et al. used Support Vector Machine (SVM) to classify pedestrian intentions at intersections, which exceeded the traditional Interactive Multi Model Extended Kalman Filter (IMM-EKF) method in accuracy and sensitivity[38]. The research by Robbins & Chapman shows that for drivers' visual attention, drivers pay more attention to distant vehicles and motorcycles, while for cyclists' attention visual search is less. Under the same variable conditions, they will give priority to predicting the motion trajectory of vehicles and motorcycles[39].
Track prediction regards pedestrian movement as a continuous process associated with historical movement, models pedestrian movement according to historical state information, and infers the movement state of pedestrians in the future, including position, speed and other information. Keller et al. proposed a first-order nonlinear pedestrian motion model based on Gaussian Process Dynamic Models (GPDMs)[40]. In this model, the pedestrian motion model is established by using the pedestrian motion characteristics obtained by optical flow method and disparity map. The parameters of pedestrian model are obtained through principal component analysis and machine learning, and the future motion characteristics of pedestrians can be finally predicted[41]. Vilaça et al. used the nuclear density estimation method to identify the black spots of VRU accidents, and established a multiple logistic regression model to determine variables with statistical significance to predict the occurrence of the VRU accidents[42]. Quintero et al. used the Gaussian process dynamic model to establish the pedestrian motion model to reduce the dimensions of pedestrian 3D attitude data, obtained the pedestrian dynamic characteristics in the hidden space through machine learning, and obtained the pedestrian trajectory prediction of 0.8 s. In addition to pedestrian posture information, traffic environment also has a direct impact on pedestrian movement[43]. Kooij et al. combined the Dynamic Bayesian Network with the Switching Linear Dynamic System (SLDS)[44]. The Dynamic Bayesian Network is used to infer the lateral movement of pedestrians according to the danger degree of the representation of the distance between pedestrians and vehicles, and whether the vehicles are observed in the representation of pedestrian head orientation. And the SLDS can predict the trajectories of travelers by taking the probabilities of fixed position model and uniform speed model respectively. Jia & David predicted the future position of cyclists in the short term by assuming constant acceleration and yaw rate. If the predicted position of cyclists overlaps the envelope of future heavy trucks, the truck braking system will be used to avoid collisions[45].
Many existing research focuses on the prediction of pedestrian's long-term route choice. Rehder & Kloeden took the pedestrian motion target as an implicit variable, and converted the motion prediction problem into a planning problem on the basis of motion target estimation. This method has good scalability[46]. Karasev et al. included the target into the variable range and gave the update equation of the target; they decouple the position, speed and direction. The position and speed are calculated by the uniform speed model, and the direction is determined by the strategy; this model also considers the influence of the relative motion of the vehicle, and gives the conversion relationship between the observation and the absolute position[47]. The model also establishes a map containing various traffic elements and introduces the influence of traffic lights. The model infers pedestrian state with the Rao blackwelled filter, and predicts pedestrian intention with the jump Markov process. However, the model does not take into account the environment and the interaction between other traffic participants and pedestrians, which has certain shortcomings. On the basis of the theory of driving safety field, Si & Yuan fully considered the psychological safety distance of VRU in the process of traffic participation, established a pedestrian risk dynamic assessment model, providing a new perspective for the development of the vehicle active safety early warning system[48]. Bandyopadhyay et al. modeled the pedestrian intention distribution based on the Partially Observable Markov Decision Process (POMDP), but used a simpler model to predict the pedestrian trajectory, and assumed that the pedestrian would move along the shortest path to reach the destination[49]. Based on the theory of man machine environment coupling, Yuan et al. analyzed the development trend of autonomous vehicles, considered the complex coupling of man, machine and environment, and analyzed and predicted the possible complexity of future accidents centering on people, providing reference for the prevention and treatment of future accidents[50]. Vourgidis et al. studied how to realize information interaction by using VRU mobile phone communication equipment to position VRU and predict long-term motion trajectory, thereby promoting the rapid development of collaborative intelligent transportation systems between vehicles and VRU[51].
Table 2 is a summary of VRU motion prediction. In summary, VRU intention identification and motion trajectory prediction in the traffic environment need to use multiple information such as its position, motion, posture and interaction with the environment. Most of the existing models only use some of the above information, and do not fully consider the competition game between rational behavior individuals, resulting in the length of prediction time and accuracy to requiring improvement.
Table 2. Summary of VRU motion prediction.
Classification List of research content Behavior prediction Micro models: Benefit Cost Cellular Model and Magnetic Force Model Individual behavior models: Markov chain model, fuzzy logic model and support vector machine. Trajectory prediction Short-term prediction
1. First-order nonlinear pedestrian motion model based on Gaussian Process Dynamic Models (GPDMs)
2. The nuclear density estimation method used to identify the black spots of VRU accidents and multiple logistic regression model.
3. Gaussian process dynamic model and pedestrian dynamic characteristics obtained through machine learning.
4. Combination of the Dynamic Bayesian Network and the Switching Linear Dynamic System (SLDS).
5. Assumptions of constant acceleration and yaw rate.Long-term prediction:
1. Method on converting the motion prediction problem into a planning problem on the basis of motion target estimation.
2. Method on including the target into the variable range and gave the update equation of the target.
3. Pedestrian risk dynamic assessment model.
4. Model the pedestrian intention distribution based on the Partially Observable Markov Decision Process.
5. Theory of man machine environment coupling.
6. Information interaction by using VRU mobile phone communication equipment to position VRU and predict long-term motion trajectory.Risk decision making research
-
In terms of VRU risk decision-making, risk assessment, as the theoretical basis of vehicle independent decision-making algorithm, is an important link in the research of active safety protection systems. The existing risk assessment models can be divided into two categories, one is the conflict parameter model based on kinematics, and the other is the artificial potential field model based on field theory. The conflict parameter model based on kinematics can be further divided into safe time model and safe distance model. The safety time model mainly includes quantitative assessment of collision risk based on such parameters as Time to collision (TTC), Post encroachment time (PET), Time advantage (TAdv), and Time difference of conflict (TDTC)[52]. Among them, TTC, PET and TAdv did not consider the differences in physical attributes between VRU and vehicle, lacked the analysis of the nature of collision risk, and could not accurately and reasonably reflect the size of VRU collision risk. TDTC considered that VRU was in a weak position in physical attributes, but did not specifically study the behavior characteristics of VRU, which also lacked accuracy. The safety distance model mainly takes the real distance between road users as the research object. The classic ones are the Berkeley model and Mazda model[53]. They quantitatively describe the size of collision risk through distance and relative speed, but the model is simple in structure. It only considers the self-driving performance and the driver's response time, does not analyze and incorporate the characteristics of VRU, and is generally only applicable to straight scenes. Matsumi et al. used the artificial potential field model based on field theory to study the pedestrian collision risk at the blind area of vehicles at the intersection[54], Raksincharoensak et al. designed the potential field structure with reference to the spring model to study the collision risk between vehicles and pedestrians[55]. Umar et al. proposed a path tracking strategy based on nonlinear model predictive control (NMPC) as the motion control method of the main control vehicle structure, and adopted artificial potential field (APF) as the motion planning strategy. In dangerous situations, APF measures collision risk and develops required yaw rate and deceleration indicators for path re planning[56]. The above artificial potential energy field model only quantifies the pedestrian collision risk, does not consider the behavior characteristics of cyclists and the handling characteristics of drivers, and has a single application scenario. Jordanka et al. built a new framework for early warning systems to assess pedestrian and bicycle safety, and combined it in a systematic way through Bayesian statistical methods. The simulation results represent prior information about the effectiveness of autonomous emergency braking and steering systems (AEBSS), and then updated these prior information and test results to obtain a posterior benefit representing the two groups of results[57].
The active safety decision-making methods for VRU protection are mainly divided into two categories: decision-making methods based on driver status monitoring and decision-making methods based on driving response. The decision-making method based on driver status monitoring reminds drivers by monitoring their driving status, attention and driving behavior. Ma et al. proposed a risk identification method based on the driver's behavior, and timely prompted the driver in a timely manner according to the road conditions and the risk status of VRU[58]; Yu proposed a dangerous working condition identification scheme based on RBF neural network by studying the difference between the driver's control status in dangerous working conditions and normal working conditions, which can be used to make dangerous working condition prompts including VRU[59]. In essence, such decision-making methods based on driver status monitoring still rely on the driver to make active safety decisions for VRU, and the depth of its auxiliary decision-making is insufficient.
The decision-making method based on driving reaction takes the reaction time of the driver in the traffic scenario with VRU as an important factor to consider the degree of danger. Most studies correspond the TTC to the degree of danger. This kind of decision-making method can be subdivided into two types: one is non cooperative active safety decision-making method, and the other is cooperative active safety decision-making method. Collaborative decision-making method is to prompt or warn VRU at the same time with the help of communication technology on the basis of non-collaboration. Honda, Qualcomm and domestic researchers have applied the pedestrian-vehicle communication based on Dedicated Short-Range Communications (DSRC) technology in the decision-making of pedestrian oriented active safety systems. Through the relative distance, vehicle speed, TTC and other indicators calculated by the system, pedestrians and vehicles can be timely warned or braked at different levels[60,61]. Yang et al. proposed a layered pedestrian collision avoidance strategy based on upper fuzzy control and lower proportion integration differentiation PID control. Based on real pedestrian test scenarios at home and abroad, they built a risk assessment model based on TTC collision time theory. On the premise of ensuring safety, fuzzy control can automatically adjust the brake strength to ensure comfort[62]. Zadeh & Ghatee adopted the same decision-making idea in the latest research, but extracted some features of VRU, driver and vehicle road environment to assist decision-making through smart phone sensors. The experimental results show that the decision-making effect of the active safety system for VRU has been significantly improved[63]. Wu et al. designed a vehicle driving controller based on pedestrian collision avoidance in the CVIS environment to solve the problem of safety collision avoidance in the movement coordination between pedestrians and intelligent vehicles, and proposed collision avoidance rules for vehicles to pedestrians in combination with the basic principle of speed obstacle methods. On this basis, they built a model predictive control framework and proposed an autonomous collision avoidance algorithm between vehicles and pedestrians[64]. However, similar studies rely on smart phones, vehicle communications, infrastructure and other conditions, and use communication technology to warn VRU, and doubt the effectiveness of cyclists. In addition, driving decisions are still based on simple indicators, and VRU intentions and trajectories are not taken into account. Applications in complex traffic environments may have problems such as poor safety and low traffic efficiency when making decisions only for the current state of VRU. Nguyen et al. exchange mobile information between vehicles and VRU entities through wireless communication, and can operate in non line of sight (NLOS) scenarios, and evaluate end-to-end performance and scalability through simulation frameworks[65].
Most of the existing active safety systems for VRU do not consider the decision-making methods in multi VRU scenarios. Wu et al. briefly mentioned that in the multi VRU scenario, the active safe driving decision for VRU only focuses on the single VRU that is most likely to collide, and discards the consideration of other potential collision objects[64]. The problems are as follows: 1) The driving decision without combining VRU intention identification and trajectory prediction is not reliable for collision risk estimation; 2) In the real traffic environment, the coupling mechanism of multi VRU collision risk still needs to be further explored.
Tables 3 & 4 are the summary of the current risk decision making research active safety decision-making methods. In summary, the existing research on risk assessment of VRU is not in-depth enough, and the intention identification and trajectory prediction of collision objects are not included in the risk assessment model. In addition, most of the current studies focus on the risk assessment models for simple pedestrians or unclassified traffic users, lacking the exploration specifically for cyclists' collision risk, and there is no active safety system collision avoidance decision-making method considering the complex scene of mixed multiple VRUs.
Table 3. Summary of risk decision making research.
Classification List of research content Conflict parameter model based on kinematics Safe time model: Quantitative assessment of collision risk based on such parameters as Time to collision (TTC), Post encroachment time (PET), Time advantage (TAdv), and Time difference of conflict (TDTC). Safe distance model: Berkeley model and Mazda model. Artificial potential field model based
on field theory1. Study on the pedestrian collision risk at the blind area of vehicles at the intersection.
2. Spring model to study the collision risk between vehicles and pedestrians.
3. Path tracking strategy based on nonlinear model predictive control (NMPC) and adopted artificial potential field (APF).
4. A framework for early warning system combined with Bayesian statistical methods.Table 4. Summary of the active safety decision-making methods for VRU protection.
Classification List of research content Decision-making methods based on
driver status monitoringRisk identification method based on the driver's behavior:
dangerous working condition identification scheme based on RBF neural network.Decision-making methods based on
driving responseNon cooperative active safety decision-making method. Cooperative active safety decision-making method:
1. Layered pedestrian collision avoidance strategy based on upper fuzzy control and lower PID control.
2. Layered pedestrian collision avoidance strategy extracted some features of VRU, driver and vehicle road environment to assist decision-making through smart phone sensors.
3. Vehicle driving controller based on pedestrian collision avoidance in CVIS environment and the basic principle of speed obstacle method.
4. Exchanging mobile information between vehicles and VRU entities through wireless communication. -
In conclusion, the research progress and future development trend of collision avoidance decision-making for vulnerable road users are summarized as follows.
First, in the complex road environment of mixed mode, the single detection of pedestrians and cyclists has the problems of low detection accuracy and confusion of classification in joint detection, which affects the safety protection of vulnerable road users.
Accurate and efficient detection of pedestrians and cyclists is the basic condition to achieve the behavior prediction of VRUs and the decision-making of vehicle safety collision avoidance. Although the research on object based detection has lasted for many years, the application of pedestrian and cyclist detection in real roads still faces complex challenges due to its attitude, lighting, occlusion and scale changes. Especially in the complex road environment in the mixed mode, the detection accuracy of pedestrians and cyclists has great challenges. Moreover, the traditional pedestrian and cyclist detection methods are independent of each other, and do not consider the consistent characteristics of pedestrian and cyclist subjects. The learning ability of the combined detection method is weak, which makes it difficult to learn the accurate differences between pedestrians and cyclists. In complex scenes, there are often problems of pedestrian and cyclist detection confusion and wrong classification. However, compared with pedestrians, cyclists are faster and more mobile. The wrong classification of pedestrians and cyclists will cause potential safety hazards for vehicle collision avoidance decisions. With the rapid development of artificial intelligence and deep learning technology, the next step is to further improve the system recognition ability through deep learning, model training and optimization. it is an important scientific issue to study a new method to realize the joint detection of pedestrians and cyclists and improve the detection accuracy and classification accuracy of pedestrians and cyclists in hybrid mode.
Second, VRU has more uncertainty in motion, and different VRUs have different characteristic information. At present, most researches on motion prediction focus on pedestrian individuals. The scene elements are single and lack of interaction between behaviors, which cannot meet the application requirements of actual road traffic scenes.
In recent years, the prevalence of green travel ideas and the emergence of bike sharing business models have promoted the use of bicycles to a new level and become a non-negligible part of VRU. Traffic accidents related to cyclists have increased significantly. For example, in China's traffic accident statistics in recent years, accidents involving bike sharing account for a certain proportion, and their number is increasing year on year[66]. At present, most research focuses on pedestrian behavior prediction, while the research on cyclists is relatively scarce, and the research on VRU group behavior prediction is even rarer. There are great differences between the posture characteristics and motion characteristics of pedestrians and cyclists. Specifically, cyclists and pedestrians have different motion models, which are more dependent on the road grade, road network layout and intersection phase characteristics. At the same time, for the information collection of vehicle perspective[67], the cyclist's movement needs to be captured for a long time, and the randomness is low. More complex behaviors will also lead to different paths, such as 'left turn' and 'straight across'. Therefore, from the perspective of pedestrian and cyclist behavior cognition, it is necessary to further expand the research on VRU group prediction, pay attention to the heterogeneity of VUR group, and carry out more detailed development and research on vehicle collision avoidance system. In this way the cognitive behavior of intelligent vehicles can adapt to today's complex and changing road traffic environment, which is of great significance to the research and development of vehicle collision avoidance active safety system.
Third, the existing VRU driving collision avoidance decision-making methods do not have enough research on the characteristics of VRU, and do not combine its intention recognition and trajectory prediction, which makes it difficult to achieve accurate and reasonable decision-making.
The behavior characteristics and physical attributes of VRU are obviously different from those of vehicles and stationary obstacles. For example, VRU is small in size and mass, high in mobility, and low in collision tolerance. The driving risk generated by VRU also has obvious characteristics. Therefore, for the collision avoidance decision-making method of VRU, it is necessary to deeply analyze the characteristics of VRU and study the impact mechanism of VRU characteristics on driving risk. However, the existing VRU collision avoidance methods consider the relatively weak position of VRU, but they do not fully analyze the characteristics of VRU. Most methods only consider pedestrians, lacking the research and consideration of cyclists' characteristics and the support of natural driving and traffic accident data. Therefore, the rationality, accuracy and effectiveness of the decision-making methods are low, which makes it difficult to meet the actual needs. In addition, VRU's intention recognition and trajectory prediction[68] have an important impact on the evolution of collision risk, which is also an important reference for drivers to actually analyze collision risk. However, there are few existing studies that combine intention recognition, trajectory prediction and risk assessment. Therefore, it is necessary to put forward a new risk assessment method to provide a theoretical basis for decision-making algorithms. This method can further excavate the accident behavior caused by VRU behavior in the case database, and then optimize the decision judgment basis through statistical analysis. This can make safer preventive decision-making behaviors for high-risk behaviors of VRU accidents. Finally, most of the existing decision algorithms only consider the external risk factors, and lack the feedback link based on the driver's status, resulting in low effectiveness of the decision results. Next, it is necessary to study how to identify the driver's status (such as drunk driving, toxic driving and driver's age) through the system, and then convert it into the basis for the decision system to select the driving mode. In this way, we can refine the collision avoidance decision-making system and better avoid collision risk.
-
First of all, through the mining of the knowledge map, it is not difficult to find that in the research field of collision avoidance decision making for vulnerable road users, scholars and institutions cooperate closely, which reflects the general trend of mutual cooperation among scientific research teams. The research focus has changed from passive traffic accident consequence utilization and traffic accident cause analysis to active deep learning and data heterogeneity analysis.
Secondly, driving collision avoidance decisions for VRU should further explore the characteristics of VRU and pay attention to the heterogeneity of VRU groups. In terms of behavior perception and behavior cognition of intelligent vehicles, it is necessary to further strengthen the research on accurate identification of pedestrians and cyclists in complex environments and on multi factor coupling and improve the collision avoidance decision-making system. Finally, in future research, we should pay attention to the integration of various factors and the further development of coupling theory and model research, so as to realize the further transformation and utilization of existing single-factor research results. In addition, multiple possibilities and results in collision avoidance scenarios should be comprehensively considered. With respect to intelligent vehicle behavior perception systems, multi-factor behavior recognition modes such as VRU intention recognition and motion trajectory prediction should be developed. This can avoid the rigidity and mechanization of recognition mode and prevent major traffic accidents due to wrong or improper anti-collision decisions. Finally, it will provide assistance for road traffic safety.
This research was funded by the National Natural Science Foundation of China, grant numbers 52072214 and 52242213.
-
Quan Yuan is the Editorial Board member of Journal Digital Transportation and Safety. He was blinded from reviewing or making decisions on the manuscript. The article was subject to the journal’s standard procedures, with peer-review handled independently of this Editorial Board member and his research groups.
- Copyright: © 2023 by the author(s). Published by Maximum Academic Press, Fayetteville, GA. This article is an open access article distributed under Creative Commons Attribution License (CC BY 4.0), visit https://creativecommons.org/licenses/by/4.0/.
-
About this article
Cite this article
Yuan Q, Gao Y, Zhu J, Xiong H, Xu Q, et al. 2023. Summarizing vehicle driving decision-making methods on vulnerable road user collision avoidance. Digital Transportation and Safety 2(1):23−35 doi: 10.48130/DTS-2023-0003 

Summarizing vehicle driving decision-making methods on vulnerable road user collision avoidance
- Received: 09 December 2022
- Accepted: 25 February 2023
- Published online: 30 March 2023
Abstract: With the development of intelligent vehicles and autonomous driving technology, the safety of vulnerable road user (VRU) in traffic has been more guaranteed, and many research achievements have been made in the key area of collision avoidance decision-making methods. In this paper, the knowledge mapping method is used to mine the available literature in depth, and it is found that the research focus has shifted from the traditional accident cause analysis to emerging deep learning and virtual reality technology. This paper summarizes research on the three core dimensions of environmental perception, behavior cognition and collision avoidance decision-making in intelligent vehicle systems. In terms of perception, accurate identification of pedestrians and cyclists in complex environments is a major demand for VRU perception; in terms of behavior cognition, the coupling of VRU intention identification and motion trajectory prediction and other multiple factors needs further research; in terms of decision-making, the intention identification and trajectory prediction of collision objects are not included in the risk assessment model, and there is a lack of exploration specifically for cyclists' collision risk. On this basis, this paper provides guidance for the improvement of traffic safety of contemporary VRU under the conditions of intelligent and connected transportation.