








-
With the rapid advancements in communication technologies, artificial intelligence, and autonomous driving, autonomous vehicles (AVs) are gradually penetrating the roads, forming a situation where traditional human-driven vehicles (HVs) and AVs coexist in mixed traffic. Moreover, this will become the main form of road traffic for a long time in the future[1]. Although AVs are equipped with advanced control capabilities and agile, reliable motion control systems, the inherent differences between automated driving systems and human driving behaviors generate complex vehicle–vehicle interactions in mixed traffic. Such interactions pose significant challenges to both traffic safety and operational efficiency[2].
Within the domain of traffic flow theory, car-following and lane changing are recognized as two fundamental driving maneuvers, constituting essential components of microscopic traffic flow models[3]. Compared to car-following, lane changing presents inherently elevated risks and exerts a more direct impact on traffic safety and operational efficiency. The lane change necessitates the intricate coupling of longitudinal speed control and lateral trajectory planning, while simultaneously managing interactions with multiple surrounding vehicles, a complexity that is further amplified in mixed traffic flows. With the advancement of high-precision perception and data acquisition technologies, recent studies have examined lane change mechanisms at the microscopic driving behavior level in mixed traffic. Research shows that among accidents attributed to lane changing, unsafe maneuvers by human drivers account for 75% of incidents[4], highlighting the critical role of drivers' risk perception and behavioral response in lane change safety. According to statistics from the National Highway Traffic Safety Administration (NHTSA), approximately 240,000 to 610,000 traffic accidents in the United States each year are related to lane change decision-making maneuvers, resulting in at least 60,000 injuries[5]. These findings underscore the critical importance of lane change decision-making for traffic safety. Accurate lane change decisions can minimize adverse perturbations to surrounding traffic and enhance road safety, whereas erroneous decisions may precipitate traffic congestion or severe collisions. Therefore, research focused on lane change decision-making is essential for improving road safety, enhancing traffic efficiency, and mitigating congestion.
In mixed traffic environments, heterogeneous vehicle types exhibit significant differences in perception capabilities, decision-making logic, and execution mechanisms. AVs rely on sensors to collect comprehensive real-time data, executing decisions through algorithm-driven systems. Conversely, human drivers depend on sensory perception, driving experience, emotional state, and subjective judgment[6]. Moreover, AVs communicate using structured, machine-readable signals through technologies such as V2X, whereas human drivers depend on unstructured sensory signals, including turn signals, gestures, and horn use. These differences in decision-making mechanisms create fundamental distinctions in information timeliness, behavioral determinacy, and interaction patterns between AVs and HVs. Consequently, mixed traffic constitutes a human–machine–environment multi-layered interaction system, where operational characteristics are jointly influenced by the variability of individual driving behaviors, communication latencies, and dynamic environmental evolution. In this context, while AV behavior is generally predictable, its presence introduces uncertainty into human drivers' decision-making processes[7]. Human driving behavior is affected by subjective emotions, driving style, trust and acceptance of autonomous technologies, and perception of traffic flow states, resulting in uncertainty and stochasticity[8]. Consequently, the stability of mixed traffic flow is significantly reduced, and complex vehicle interactions can readily precipitate local congestion, traffic oscillations, and safety risks[9].
Existing lane change decision-making models exhibit certain limitations in mixed traffic environments. The irrational behaviors, limited control capabilities, and unpredictable intentions of HVs often cause the collective movement of mixed traffic streams to evolve into disordered states[10]. In addition, the absence of explicit information exchange mechanisms between HVs and AVs impedes the ability of automated systems to accurately perceive the kinematic states of surrounding traffic in real time. To address these challenges, this study initially employs the VOSviewer tool to conduct a bibliometric analysis and visualization of relevant literature. From the perspective of driving safety, the importance of driver behavior prediction and risk assessment is highlighted. Furthermore, existing lane change decision-making studies are classified into three categories: rule-based models, data-driven models, and game theory models. A comprehensive review of related literature is provided. Finally, the current research outcomes are summarized, and prospective research directions are delineated. This work provides researchers with a systematic understanding of the emerging paradigms and technologies in lane change studies, offers multi-dimensional perspectives for developing models within mixed traffic environments, and contributes to the further optimization of lane change decision-making systems.
-
To reveal the evolutionary trends in research on vehicle lane change, this study used the Web of Science (WoS) Core Collection database as the source of literature data. The literature retrieval covered the period from 2000 to 2025, using the following topic search strategy: TS = ('lane changing' OR 'lane change' OR 'vehicle lane change' OR 'lane changing behavior' OR 'lane change decisions') AND TS = ('risk assessment' OR 'deep learning' OR 'reinforcement learning' OR 'game theory'). To ensure relevance and comparability, only journal articles were included, while conference papers, reviews, and book chapters were excluded. In addition, a manual screening of titles, abstracts, and keywords was conducted to remove entries unrelated to vehicle lane change. After rigorous screening and deduplication, a total of 1,936 English-language articles were selected for subsequent analysis. The publication year distribution reflects, to some extent, the research status, level, and development pace of this field, and visual analysis can help identify periods of intensified research activity[11]. As illustrated in Fig. 1, the annual publication volume remained relatively stable between 2000 and 2010. However, a continuous upward trend is observable post-2011. This surge is largely attributed to the widespread application of artificial intelligence in transportation, alongside advancements in data acquisition and processing technologies, which have significantly bolstered research into lane change.
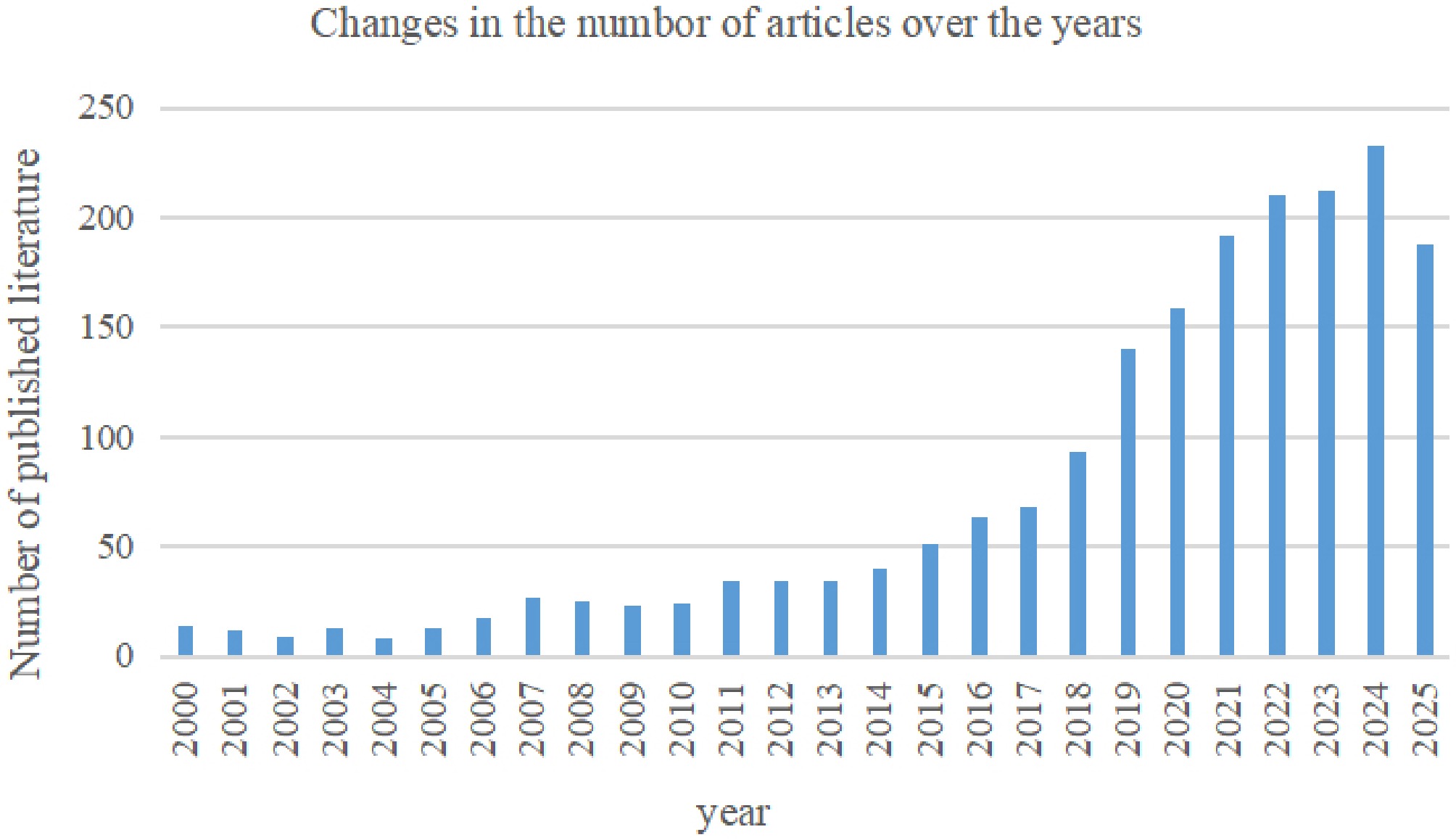
Figure 1.
Annual trend in publication volume.
Keyword co-occurrence analysis
-
VOSviewer serves as a prominent visualization instrument within the domain of bibliometric analysis. Utilizing advanced network layouts and efficient clustering algorithms, it graphically elucidates complex relational structures among publications, including co-authorship, co-citation, bibliographic coupling, and keyword co-occurrence. In this study, 1,936 sample papers were imported into VOSviewer for bibliometric analysis, focusing on keyword co-occurrence. From the 1,936 articles, a total of 5,221 keywords were extracted for visualization. To enhance representativeness and focus, a minimum occurrence threshold of ten was applied. Furthermore, synonymous terms were consolidated, and generic or irrelevant descriptors were excluded. Ultimately, 86 core keywords satisfying these criteria were identified. The resulting co-occurrence network is illustrated in Fig. 2. Each node in the network represents a keyword, with the node size proportional to its occurrence frequency. The node color indicates the average publication year of the related literature, ranging from early studies (blue) to recent ones (yellow), thus illustrating the temporal evolution of research hotspots. As shown in Fig. 2, early studies mainly focused on lane change, vehicle dynamics, and optimal control. Subsequently, research gradually expanded to topics such as driving behavior and safety. In recent years, with the rapid development of artificial intelligence, research on lane change has increasingly shifted toward AVs, leading to the emergence of numerous data-driven lane change prediction and vehicle trajectory planning models. In the future, as vehicle–infrastructure cooperation continues to advance, developing more accurate lane change models and exploring driver behavior characteristics to improve safety, comfort, and efficiency during lane changes have become key directions in this field.
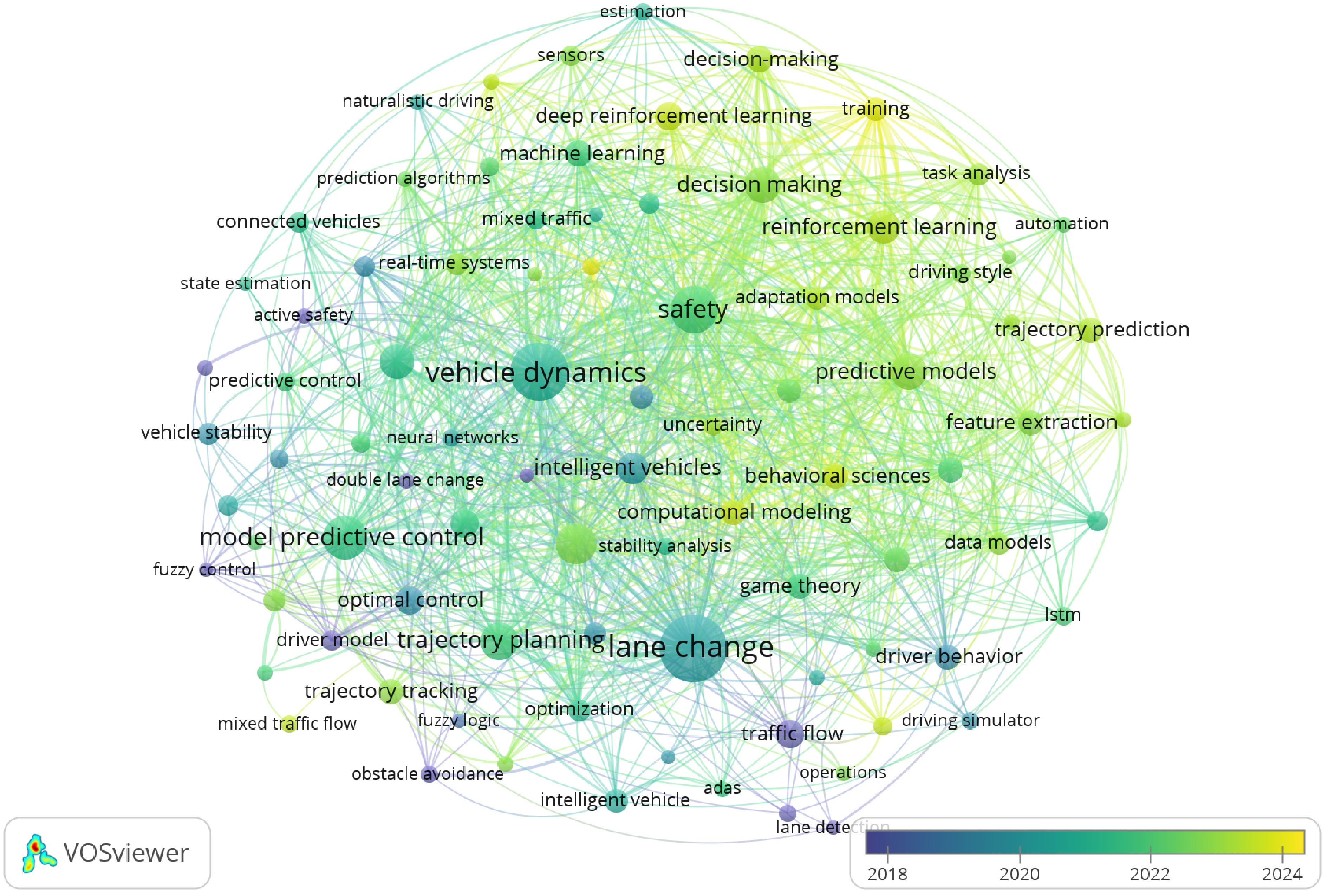
Figure 2.
Keyword visualization.
-
Lane change behavior is a complex process requiring a vehicle to make decisions and adjustments based on its own driving characteristics and external factors such as surrounding vehicle speed and distance, road occupancy, and traffic conditions. The current classification of lane changing behavior typically divides it into two types—discretionary lane change and mandatory lane change—based on different behavioral motivations[12].
Discretionary lane change
-
Discretionary lane change refers to a voluntary maneuver initiated to enhance travel efficiency and ride comfort, contingent upon favorable traffic conditions. The primary impetus for a discretionary lane change is typically the pursuit of a higher travel velocity or the alleviation of speed impedance. As illustrated in Fig. 3, when the subject vehicle (red vehicle) operates below its desired speed due to slower preceding traffic, the driver evaluates the kinematic states of surrounding vehicles in the target lane to execute a maneuver. In mixed traffic, AVs generally determine the optimal lane change timing through algorithmic calculations. In contrast, HVs make decisions based on individual judgment and driving preferences[13], thereby introducing elements of randomness and flexibility. The inability of AVs to accurately perceive human drivers' intentions further increases the complexity of discretionary lane change.
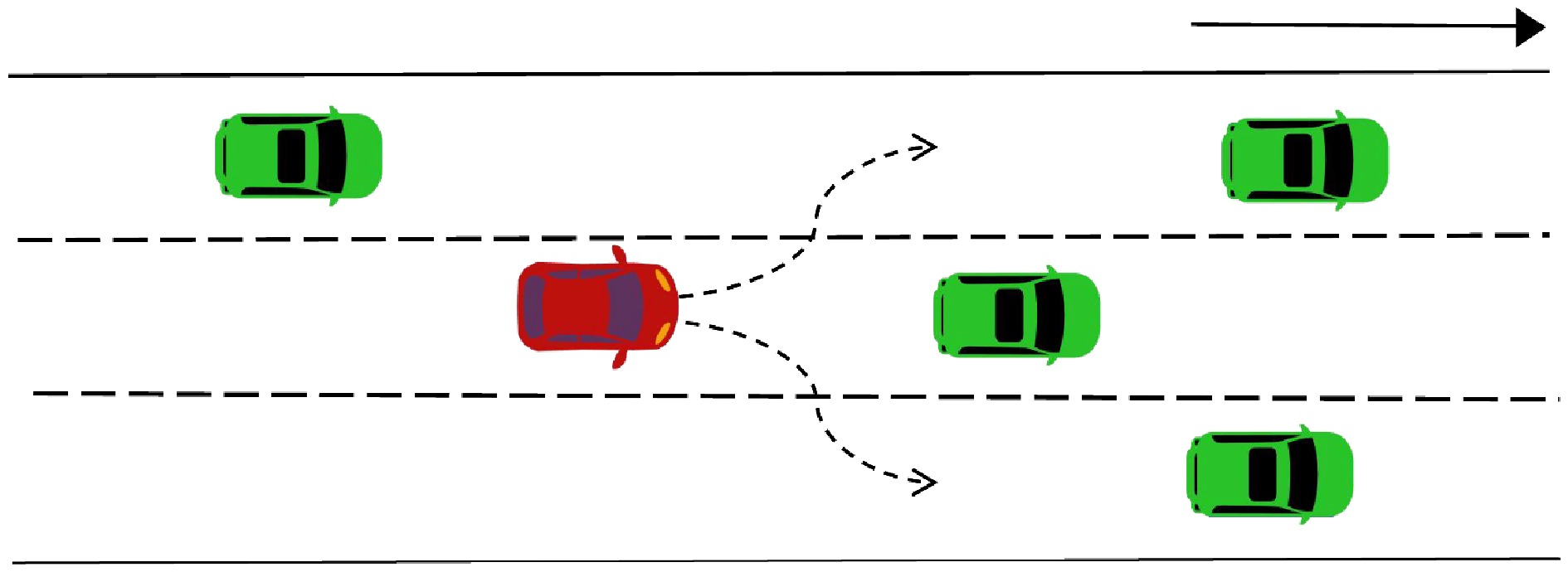
Figure 3.
Discretionary lane change.
Mandatory lane change
-
Mandatory lane change refers to a vehicle's required maneuver to change lanes within a specific road section due to constraints imposed by traffic or road conditions[14]. Typical scenarios necessitating mandatory lane change include highway merging/diverging maneuvers or navigating lane closures due to construction zones or obstacles. As illustrated in Fig. 4, when the subject vehicle (red vehicle) encounters an obstacle, it must complete the lane change maneuver within a designated area. In mixed traffic, a mandatory lane change carries higher risks because it is unavoidable and follows a strongly constrained path. Compared to a discretionary lane change, it has a clear objective and must be completed within a specific spatial and temporal range, with the latest possible lane change position.
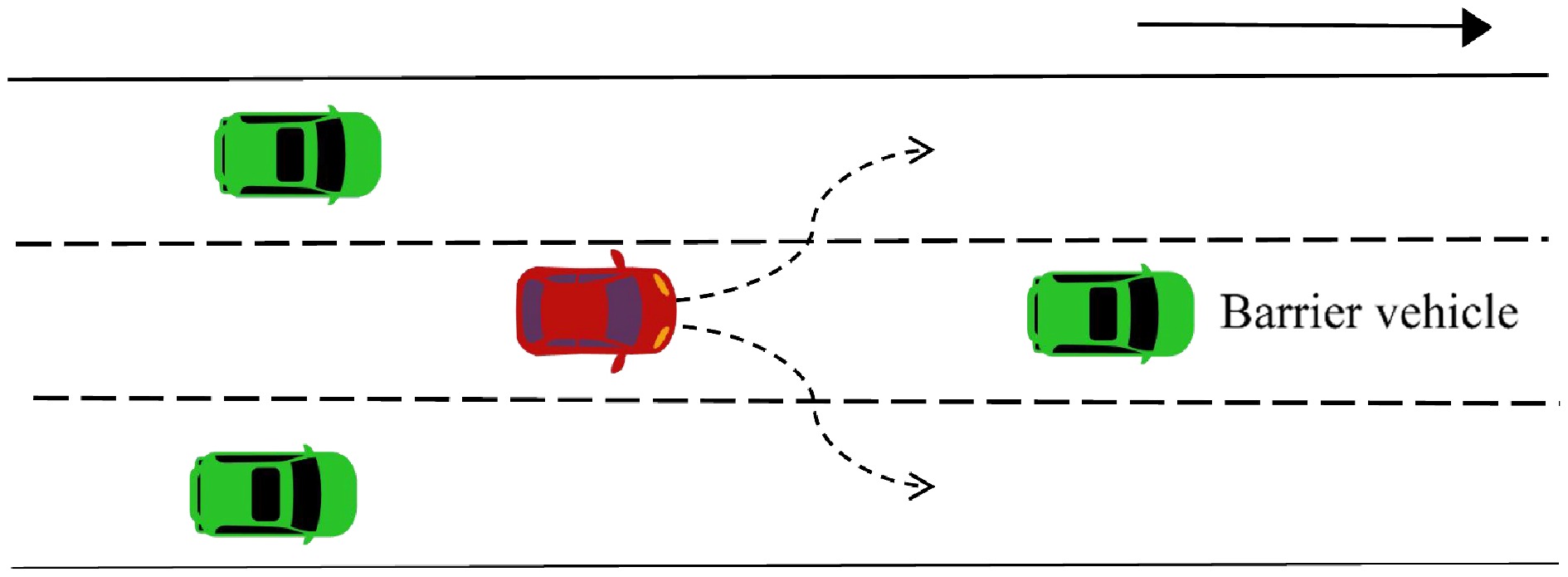
Figure 4.
Mandatory lane change.
In a mixed human–machine driving environment, lane changing behavior is influenced by the dynamic evolution of surrounding traffic and the heterogeneous driving styles of human drivers. To systematically analyze the lane change mechanism in such environments, the process can be divided into a decision-making stage and an execution stage, as shown in Fig. 5. The decision-making stage refers to the stage from the moment the vehicle generates the intention to change lanes until the decision to begin the lane change is made. The execution stage begins at the lane change starting point and ends at the lane change endpoint. After the decision is made, the vehicle executes a steering maneuver to achieve a significant lateral displacement, moving continuously from the center line of the original lane towards the center line of the target lane. This phase requires handling complex dynamic interaction issues. Constructing a safe and robust lane change decision model in a mixed driving environment mandates the comprehensive consideration of proactive longitudinal maneuvers of preceding and following vehicles. Additionally, the model must accurately predict the behavioral intentions of surrounding human drivers and closely monitor the dynamic interactions between surrounding vehicles.
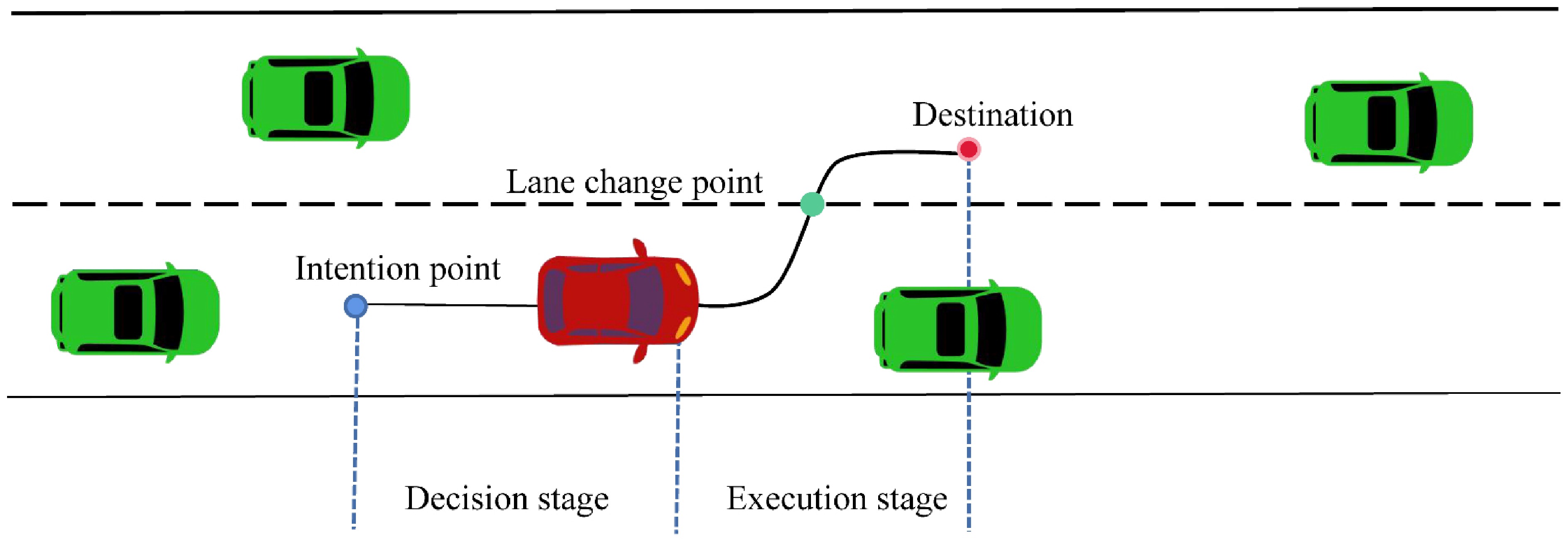
Figure 5.
Schematic diagram of the phases of lane change.
Driver behavior prediction
-
In mixed traffic environments characterized by complex vehicular interactions, accurately predicting the behavior of HVs is pivotal for optimizing lane change decision-making models. The prediction of lane change maneuvers necessitates the integration of multifaceted influencing factors, including traffic environmental data, vehicle dynamics, and driver behavioral metrics[15]. Mitrovic[16] collected parameters such as the speed and acceleration of target vehicles passing through intersections and utilized Hidden Markov Models (HMM) to identify specific driving behaviors. Liu et al.[17] collected driver visual information, head orientation, and vehicle dynamics. They employed a long short-term memory network (LSTM) to predict potential future driving behaviors. Guo et al.[18] analyzed driver's eye movement, head rotation, vehicle movement, and the driver's maneuver parameters, and developed a lane change intention model using an attention-based bidirectional long short-term memory network (AT-BiLSTM), which improved the accuracy of behavior prediction.
The aforementioned studies have predominantly analyzed vehicle states and driver information in isolation, often overlooking the dynamic coupling between these factors and failing to account for individual behavioral heterogeneity. Therefore, integrating multi-source information while considering personalized differences has become a key direction for improving prediction accuracy. Du et al.[19] integrated the vehicle driving states, surrounding traffic conditions, and driving styles to predict lane changing behavior using an HMM. Wang et al.[20] considered the relationship between the driving environment and drivers to predict lane changes. They employed a fuzzy inference system (FIS) to simulate drivers' perception of the driving environment and input both environmental information and vehicle trajectories into an LSTM network, achieving accurate lane change prediction. Liao et al.[21] constructed a driver digital twin (DDT) model and used historical driving data to perform personalized modeling of driver behavior. They further utilized edge servers to enable real-time prediction of lane-changing behavior. Current research has achieved notable progress in predicting driver lane-changing behavior in mixed traffic environments, primarily through multi-source information fusion and personalized driver modeling. However, limitations remain. Dynamic interactions among vehicle-driver-environment are not fully captured, and the generalizability of personalized models is limited. Future research should focus on modeling these dynamic interactions and validating prediction models in more complex mixed traffic scenarios. This approach will enhance the robustness of behavior prediction models and improve the reliability and safety of AV decision-making in real-world traffic.
Lane change risk assessment
-
During a lane change, various potential driving risks exist. Accurately assessing these risks is a crucial prerequisite for ensuring safety and optimizing traffic efficiency. A comprehensive risk assessment requires considering multiple factors, including traffic flow, vehicle speed, road conditions, and driver behavior characteristics[22]. In mixed traffic environments, lane change risks stem not only from the intrinsic dynamic properties of the ego vehicle but also from interaction complexity and information uncertainty. The heterogeneity regarding perception, communication, and behavioral responses between AVs and HVs induces strongly coupled risk evolution patterns. Current risk assessment approaches primarily include trajectory-based analytical methods, probabilistic models, and traffic conflict indicator methods, as summarized in Table 1. Trajectory-based approaches leverage high-fidelity data and intention prediction to characterize risk features. Huang et al.[23] proposed a probabilistic driving risk assessment framework based on intention recognition and surrounding vehicle risk evaluation, considering the ego-vehicle's and adjacent vehicles' spatial positions and driving states. The framework employs an LSTM-based Intention Identification Model (IIM) and a Risk Assessment Model (RAM) to recognize intentions and output potential risks. Wang et al.[24] introduced a probabilistic driving risk field based on two-stage multimodal trajectory prediction. This architecture integrates intent and trajectory prediction modules, thereby circumventing dependence on explicit dynamic system models or predefined distributions. Risk is assessed via lane change pattern probability, collision likelihood, and expected severity, improving both accuracy and real-time performance. Hu et al.[25] analyzed the dynamic mechanism of risk variation under spatiotemporal influences using trajectory data and applied fuzzy logic to integrate conflict frequency and severity into a comprehensive risk indicator. A spatial Markov model and panel regression were further employed for real-time assessment of dynamic risk evolution. Considering the uncertainty of driver behavior in mixed traffic environments, Li et al.[26] proposed a probabilistic risk assessment method. This approach evaluates driving risk using position uncertainty and distance-based safety indicators and applies deep reinforcement learning to find strategies with the minimum expected risk.
Table 1. Lane change risk assessment methods.
Method used Advantages Year Ref. Long short-term memory Analyzes the factors affecting driving safety and the scope of potential risks 2020 [23] Multimodal trajectory prediction Explains human driving behavior by adjusting subjective risk parameters; suitable for mixed traffic scenarios. 2022 [24] Fuzzy logic theory Reveals the spatiotemporal dynamics of risk states and quantifies the influencing factors of risk. 2023 [25] Probabilistic model Fully considers position uncertainty and distance-based safety indicators. 2022 [26] Traffic conflict index Breaks through traditional single-threshold methods and enables dynamic risk grading. 2020 [28] Traffic conflict index Dynamically expands the TTC model based on high-precision microscopic trajectory data. 2022 [29] Traffic conflict indicators serve as pivotal instruments for the safety evaluation of lane change maneuvers. By quantifying critical collision risk parameters, these indicators render risk assessment more intuitive and operationally viable. Common indicators include time to collision (TTC), time to brake (TTB), and post-encroachment time (PET). These metrics are frequently adapted or extended to accommodate diverse driving scenarios, thereby facilitating a more targeted evaluation of lane change risks. Park et al.[27] investigated the continuous distribution of the stopping distance index (SDI) during lane change maneuvers to probe the interactions between the ego vehicle and neighboring traffic. They proposed a lane change risk index (LCRI) and applied fault tree analysis (FTA) to the evaluation framework. Zhou[28] used TTC as a risk metric to analyze two types of interaction conflicts. By dynamically calculating TTC, they assessed risk levels under different interaction patterns and revealed their spatiotemporal characteristics and formation mechanisms. Liu et al.[29] improved the traditional TTC model by applying mutual information theory. Their method considered lane change position, direction, and the dynamics of adjacent vehicles, which enabled real-time identification of dynamic risks in complex scenarios.
Current risk assessment methodologies exhibit significant diversity, encompassing trajectory-based analysis, probabilistic modeling, and traffic conflict indicators. Notwithstanding substantial advancements, lane change risk assessment continues to confront systemic impediments. Specifically, constraints such as fragmented data sharing, inadequate fusion of multi-source heterogeneous data, and limited adaptability to complex scenarios may exacerbate evaluation errors. Future research should strengthen multi-source data fusion and cross-scenario data sharing. By integrating vehicle sensor data, V2X communication, road monitoring information, and driver state data, a unified risk data framework can be established. In addition, intelligent risk assessment systems should be developed by combining reinforcement learning with real-time decision-making mechanisms to achieve dynamic risk evaluation and adaptive control. Through multidimensional analysis and risk modeling of lane changing behavior in mixed traffic, these advancements can provide more accurate safety decision support for autonomous driving systems and promote the safe, efficient, and intelligent development of human–machine co-driving traffic systems.
Evaluation indicators and validation methods for mixed traffic flow
-
In mixed traffic environments characterized by the coexistence of AVs and HVs, traditional univariate evaluation approaches are insufficient to adequately capture the safety and coordination dynamics of lane-changing maneuvers. Contemporary research predominantly utilizes surrogate safety measures, such as TTC and PET, to assess risks across varying AV penetration rates and roadway conditions via simulation. However, these metrics typically quantify safety solely from a temporal or unidimensional perspective. They fail to account for the distinct disparities in communication, perception, and decision-making mechanisms between AVs and HVs, thereby compromising their ability to reflect the holistic safety risk. Therefore, it is necessary to establish a multi-dimensional evaluation framework, supported by multi-layered validation—from simulation to field testing and from offline to online assessment—to more accurately and comprehensively evaluate safety in mixed traffic flow.
Evaluation indicator system
-
To conduct a comprehensive and objective evaluation of safety and coordination within mixed traffic flows, a multi-dimensional indicator system is established. To capture the risk of rear-end collisions and speed fluctuations, time-based surrogate measures such as Modified Time-to-Collision (MTTC) and Lane Change Time-to-Collision (LCTTC) are adopted. Furthermore, deceleration-based indicators, including the Deceleration Rate to Avoid a Crash (DRAC) and the Collision Potential Index (CPI), are utilized to assess braking requirements. In addition, Time Headway (TH), Speed Standard Deviation (SD), Velocity Coefficient of Variation (VCS), and Emergency Lane Change Risk Frequency (ELCRF) are employed to evaluate the overall safety performance of the traffic stream. Detailed definitions and explanations of each indicator are provided below.
Modified time-to-collision (MTTC)
-
MTTC is an improved metric for evaluating longitudinal conflict risk in car-following scenarios. Unlike the traditional TTC, MTTC incorporates the accelerations of both the leading and following vehicles. This enhancement enables a more realistic assessment of potential collision risks for HVs and AVs in mixed traffic. MTTC is calculated using:
$ MTTC=\dfrac{-{\Delta }V\pm \sqrt{\Delta V_{f}^{2}+2{a}_{f}\Delta D}}{{a}_{f}} $ where,
$ \Delta $ $ \Delta $ $ \Delta $ Lane change time-to-collision (LCTTC)
-
LCTTC is used to assess lateral conflict risk during lane change maneuvers. It represents the remaining time before a potential lateral collision occurs between a lane-change vehicle and a vehicle in the target lane. This indicator captures the dynamic interaction between vehicles and is essential for evaluating safety in lane change scenarios. LCTTC is calculated as:
$ \mathrm{LCTTC}=-\dfrac{d_{a,b}}{V_{a,b}}=-\dfrac{\left(P_b-P_a\right)^T\times\left(P_b-P_a\right)}{\left(P_b-P_a\right)^T\times\left(V_b--\right)} $ where, da,b is the distance between the lane changing vehicle and the vehicle in the target lane (m); Va,b is the relative speed of the two vehicles (m/s); Pb = (xb, yb) and Pa = (xa, ya) denote the position vectors of the target-lane vehicle and the lane changing vehicle, respectively; represent the velocity vector of the target-lane vehicle; Va represent the velocity vector of the lane change vehicle.
Deceleration rate to avoid a crash (DRAC)
-
DRAC is an indicator used to evaluate longitudinal conflict risk. It refers to the minimum required deceleration that a vehicle must apply to avoid a collision, assuming that the conflicting target vehicle maintains its current speed and trajectory. In mixed traffic flow, DRAC reflects the emergency braking capability of AVs when interacting with HVs exhibiting diverse behaviors. DRAC is calculated as:
$ DRAC(t)=\dfrac{[v_i(t)-v_{i-1}(t)]^2}{2[x_{i-1}(t)-x_i(t)-l_{i-1}]}$ where, vi(t) is the speed of the following vehicle at time t (m/s); vi−1(t) denotes the speed of the leading vehicle at time t (m/s); xi−1(t) denote the position of the leading vehicle at time t (m); xi(t) denote the position of the following vehicle at time t (m); and li−1 is the length of the leading vehicle (m).
Collision potential index (CPI)
-
The Collision Potential Index (CPI) provides a macroscopic measure of longitudinal conflict risk for the entire traffic stream or vehicle platoon. By integrating DRAC values over time and averaging across space, CPI aggregates instantaneous microscopic conflicts into an indicator that reflects the overall safety level of a roadway segment.
$ CPI=\dfrac{\sum \nolimits_{n=2}^{N}\sum \nolimits_{t={t}_{0}}^{T}{DRAC}_{n}\left(t\right)\Delta t}{\left(T-{t}_{0}\right)\left(N-1\right)} $ where,
$ \Delta $ Time headway (TH)
-
TH is defined as the time interval between two successive vehicles passing a fixed point in the same lane. It reflects differences in car-following behavior between AVs and HVs and is an important indicator for assessing following safety. TH is calculated as:
$ TH={t}_{i}-{t}_{i-1} $ where, ti is the moment when the ith vehicle passes the fixed point; and ti−1 is the moment when the (i−1)th vehicle passes the fixed point.
Speed standard deviation (SD)
-
SD is a statistical metric used to describe the dispersion of vehicle speed distribution. It reflects fluctuations and asymmetry in mixed traffic flow, where AVs tend to maintain stable speeds while HVs exhibit significant speed fluctuations. SD is computed as:
$ \sigma =\sqrt{\dfrac{\sum \nolimits_{i=1}^{N}{\left({V}_{i}-\overline{V}\right)}^{2}}{N-1}} $ where, N represents the total number of vehicles (veh); Vi denotes the speed of the i (m/s);
$ \overline{V} $ Velocity coefficient of variation (VCS)
-
VCS is used to measure the relative dispersion of a speed distribution. By eliminating the influence of scale and mean speed, VCS allows better comparison of speed variability across different traffic states or roadway segments. This metric can more effectively evaluate the stability and safety of a traffic stream. VCS is defined as the ratio of the speed standard deviation to the mean speed. VCS is computed as:
$ VCS=\dfrac{\sigma }{\overline{V}} $ where,
$ \sigma $ $ \overline{V} $ Emergency lane change risk frequency (ELCRF)
-
ELCRF is a behavioral indicator that indirectly captures lateral conflict risk through the frequency of urgent lane changes. It is defined as the ratio of emergency lane changes to total lane changes, reflecting the intensity of vehicle interactions and potential conflicts. Emergency lane changes refer to maneuvers that must be executed urgently, typically due to imminent conflict, congestion avoidance, or safety enhancement needs. These lane change requests are characterized by a higher priority and greater immediacy compared to regular lane changes. ELCRF is calculated as:
$ ELCRF(t) =\dfrac{n_{e}(t)}{n_t(t)} $ where, ne(t) is the number of emergency lane changes, and nt(t) denotes the total number of lane changes.
Validation methods
-
Given the complexity of mixed traffic environments, validating lane-changing decision models necessitates a combination of complementary methods. A multi-level validation framework—from simulation to real-vehicle testing, and from offline evaluation to online verification—is established
(1) Simulation-based validation is currently the most efficient and widely adopted approach. Microscopic traffic simulation tools such as SUMO and VISSIM are utilized to assess the model's impact on overall traffic efficiency and stability. Concurrently, high-fidelity simulation platforms, including CARLA and LGSVL Simulator, provide realistic perception interfaces and control environments for evaluating safety and comfort. Furthermore, Human-in-the-loop simulation captures the complexity of mixed human–machine driving by involving real drivers interacting with virtual scenarios. This enables an effective assessment of an AV's capability and robustness when facing human irrationality and diverse driving styles.
(2) Real-vehicle testing is essential for verifying the engineering feasibility of decision models, but faces challenges such as high cost, safety risks, difficulty of data collection, and limited scenario reproducibility. Closed-track testing facilitates the evaluation of safety limits and decision stability under controlled conditions. Conversely, open-road testing examines interaction adaptability and risk management within naturalistic, mixed-traffic environments. To ensure the representativeness and generalizability of experimental outcomes, the testing protocol must incorporate a diverse array of roadway scenarios and varying intensities of human–machine interaction.
(3) Adversarial and robustness testing is gaining increasing attention due to the inherent uncertainty in mixed traffic flow. By introducing perturbations, extreme scenarios, or irrational human behaviors in simulation or real-vehicle platforms, weaknesses of the model under abnormal or unexpected conditions can be identified. This process yields critical insights for subsequent model optimization.
In summary, within mixed traffic environments characterized by the coexistence of AVs and HVs, fundamental disparities in perception, decision-making, control, and communication significantly increase interaction variability and uncertainty. Consequently, safety evaluation must comprehensively encompass longitudinal and lateral conflicts, microscopic behavioral heterogeneity, and macroscopic flow stability. Meanwhile, the multi-level validation framework integrating simulation, real-vehicle testing, and adversarial testing ensures both the reliability of evaluation results and the engineering feasibility of the models.
-
Lane change decision models are designed to determine the feasibility, timing, and execution location of lane-changing maneuvers. Existing research can be broadly categorized into three primary paradigms: rule-based models, data-driven models, and game theory models. To elucidate the developmental trajectories and temporal evolution of these approaches, Fig. 6 presents a chronological organization of representative studies, highlighting the progression from rule-based methods to data-driven approaches and multi-agent game-theoretic frameworks. Rule-based models predicate decisions on predefined logical rules or kinematic principles. They are suitable for simple scenarios but lack flexibility in decision-making. Data-driven models learn lane change patterns by mining large volumes of driving behavior data. While they demonstrate strong adaptability, their performance relies heavily on extensive labeled datasets and often lacks interpretability. Game-theoretic models treat lane changing as a strategic interaction among vehicles and can better capture driver behavior, but face challenges with irrationality modeling, information requirements, and computational complexity. This chapter reviews these three decision-making models, analyzing their respective advantages and limitations.
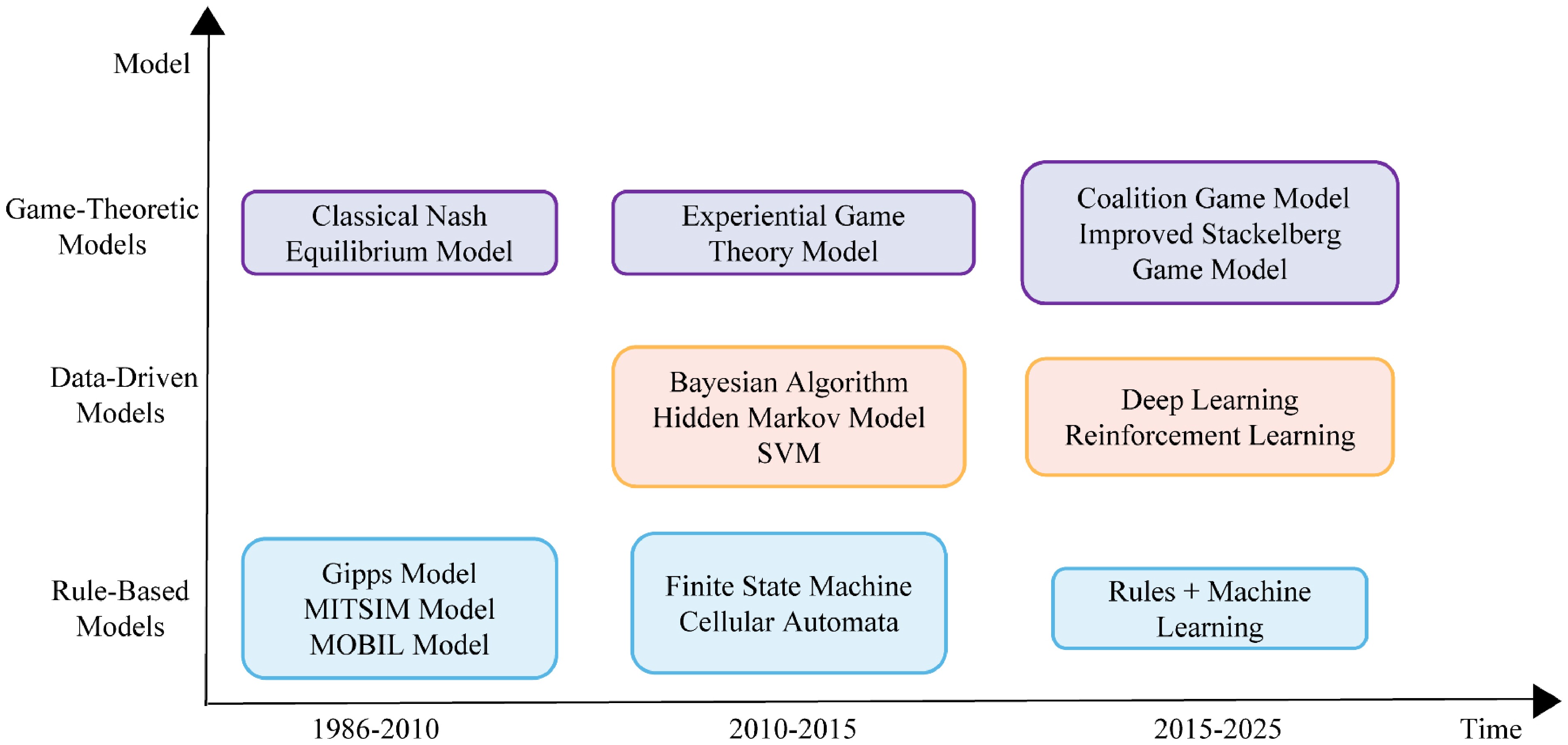
Figure 6.
Classification diagram of lane change decision model.
Rule-based lane change decision making
-
Rule-based lane change decision-making methods establish a rule set for lane-changing behavior based on traffic regulations, expert demonstrations, and surrounding environmental data. The AVs then match real-time information with the predefined conditions in this rule base to make a lane change decision. The theoretical foundation of this approach can be traced back to the Gipps model proposed by Gipps in 1986[30]. It divides the lane change decision process into three aspects: lane change intention, lane change conditions, and lane change safety, laying the groundwork for rule-driven methods. Yang et al.[31] improved the Gipps model to propose the MITSIM model. This model accounts for the uncertainty of lane change decisions by introducing a driver's lane change probability. It refines the decision-making process into a four-stage continuous sequence: decision to change lanes, target lane selection, acceptable gap calculation, and execution. The MOBIL model[32] innovatively introduced a dual-indicator system for target lane desirability and safety. It also considers the impact of the ego vehicle's maneuver on the following vehicle's braking. This propelled rule-based models to evolve from static to dynamic interactive scenarios.
Finite State Machine (FSM) models are widely used in lane change decision-making due to their ability to intuitively and logically represent discrete state relationships through directed graphs. Ji et al.[33] proposed a lane change decision method that integrates a virtual danger potential field with an FSM to meet the behavioral decision needs of intelligent vehicles. Xiong et al.[34] designed a lane-changing behavior decision framework based on a Hierarchical State Machine (HSM). They incorporated the environment perception, decision planning, and execution control modules into a distributed system architecture based on a Real-Time Control System (RCS). Wang et al.[35] proposed a decision-making algorithm that combines finite state machines with fuzzy reasoning for unidirectional two-lane scenarios, enhancing scene traversal depth and adaptive adjustment to improve decision accuracy. In human-machine mixed traffic, Liu et al.[36] constructed a cellular automaton model for heterogeneous traffic flow. They analyzed three driving styles of HVs using actual data sets and introduced the Gipps rule to establish safe conditions for following and lane change rules. To further improve the accuracy of lane change decision-making, Jia et al.[37] innovatively combined rule abstraction with machine learning. They employed a support vector machine (SVM) to build a lane change decision model, where lane change rules are converted into new features and safety constraints and then integrated into the model's training process. By introducing new rule-related features, this method significantly improved the accuracy of predicting lane-changing behaviors.
Rule-based lane change decision methods offer strong interpretability and reliability. In simple traffic scenarios, they can generate lane change decisions with low complexity and computational cost. However, their applicability is notably constrained within complex, mixed-traffic environments. Specifically, it's challenging for them to fully account for dynamic factors like driver characteristics and actual road conditions, leading to insufficient adaptability to real-time traffic changes. Furthermore, traditional rule-based methods rely on static rules for decision-making and cannot effectively capture the variable behaviors and intentions of human drivers, which increases the uncertainty of lane-change decisions. Table 2 provides a summary of rule-based lane change decision methods.
Table 2. Rule-based lane change decision method.
Input variables Algorithm Issues Advantages Year Ref. Vehicle state and driver behavior features Rule-based two-stage decision model Driver behavior is not classified Quantitatively considered the response of following vehicles in the target lane 1986 [30] Traffic flow data and vehicle dynamic information MITSIM Does not consider nearby vehicles during lane changes Incorporated probabilistic logic, reflecting driver risk preferences 1996 [31] Position, speed, and acceleration of the vehicle and surrounding vehicles MOBIL Ignored vehicle dynamics during lane changes Applied benefit–safety dual-condition mechanism, closer to human driving 2007 [32] Road information, vehicle information, and other obstacle data HSM + RCS Insufficient model generalization and simplified safety evaluation Used real-road data and RCS to quantify lane change risk 2018 [34] Dynamic traffic data of vehicles Fuzzy inference + FSM Limited applicability of the algorithm, strong rule dependence Effectively handled uncertain information 2023 [35] NGSIM database Cellular automata model Overly simplified model Quantifying the differences in human driving styles 2023 [36] US-101 NGSIM database Rule-based + machine learning Motion prediction model remained relatively simple Balanced interpretability with adaptability to complex scenarios 2022 [37] Data-driven lane change decision making
-
With the continuous advancement of computer science and data mining techniques, data-driven lane change decision-making methods have attracted increasing attention from researchers. The core of this approach lies in the iterative interaction between the agent and its environment, whereby driving strategies are continuously learned and optimized through environmental feedback, ultimately enabling autonomous decision-making of vehicles. Owing to its adaptability to various lane change demands across different driving scenarios, this method has become a mainstream research direction in autonomous lane change decision studies. However, challenges remain, particularly regarding limited interpretability and strong dependence on dataset quality. Consequently, researchers focus on improving data reliability and model robustness. Depending on the learning mechanism, these methods are generally categorized into three distinct classes: traditional machine learning, deep learning, and reinforcement learning.
Traditional machine learning methods
-
Methods based on traditional machine learning rely heavily on manual feature engineering. By mining statistical patterns in the data through models, they are particularly suitable for lane change decisions in small-sample datasets or specific scenarios, and they offer relatively strong interpretability. To address the problem of incomplete feature selection in vehicle lane change decision models, Gu et al.[38] extracted decision variables from physical states, interactional perception information, and roadway structural characteristics, and developed an SVM decision model optimized using a Bayesian algorithm. Li et al.[39] proposed an innovative SVM algorithm optimized by the artificial bee colony (ABC) method, in which the penalty factor and kernel function parameters of the SVM were optimized to construct a lane change recognition model. In mixed traffic environments, the uncertainty of vehicle lane-changing behavior increases, making decision detection more challenging. Zhao et al.[40] constructed a vehicle lane change decision model based on Bayesian networks using vehicle speed, acceleration, and relative time headway of surrounding vehicles as feature parameters. Wang et al.[41] proposed an adaptive lane change prediction model based on Bayesian inference. The model combined LSTM networks with adaptive decision thresholds, where Bayesian inference was applied to dynamically update the thresholds, enabling adaptation to different road and traffic conditions and improving prediction accuracy. To address the weak capabilities in identifying and predicting risks associated with continuous lane changing, Hu et al.[42] employed a Bayesian global optimization (BO) gated recurrent unit (GRU) neural network (BO-GRU) model. By optimizing GRU network parameters, the model improved the precision of risk identification and prediction, and further allowed for personalized adjustment according to individual driving styles. Xu et al.[43] considered the differences in driver styles in mandatory lane change decisions and proposed a mixed architecture that integrates Evolutionary Game Theory (EGT) with machine learning (ML). By introducing physical information through EGT, the model can capture the progressive cooperative interactions among drivers and predict the decisions of drivers with various driving styles.
In the complex environment of human–machine mixed driving, accurately predicting human driver behavior is crucial for ensuring safe vehicle lane changes. Chen et al.[44] developed an improved input–output hidden Markov model (IOHMM) that captures historical memory and models continuous outputs, establishing a prediction model that accounts for both driver lane change intentions and behaviors. Zhang et al.[45] proposed a framework that combines primitive-based interaction pattern recognition and risk analysis. The lane changing scenarios were first decomposed into primitives using a Hidden Markov Model with the Gaussian Mixture Model (GMM-HMM) approach. Then, K-means clustering with Dynamic Time Warping (DTW) was applied to group the primitives into 13 lane change interaction patterns. Two types of vehicle interactions were considered to calculate the TTC, which was further used to identify high-risk lane change interaction patterns. Table 3 provides a summary of traditional machine learning methods in data-driven lane change decision-making approaches.
Table 3. Lane change decision-making method based on traditional learning.
Input variables Algorithm Issues Advantages Year Ref. US-101 and I-80 NGSIM database SVM Relies on manual feature extraction, limited dynamic scene adaptability Incorporates physical, interaction, and road structure features 2020 [38] US-101 NGSIM database ABC-SVM Relies on ego-vehicle data, neglects surrounding traffic environment Avoids grid search inefficiency and local optima 2021 [39] US-101 NGSIM database Bayesian Network Lacks a real-time updating mechanism; limited adaptability Transforms driver decision uncertainty into quantifiable probabilistic outputs 2020 [40] High D dataset LSTM + Bayesian Network Neglects personalized factors such as driver style and vehicle type Dynamically updates decision thresholds, adapts to diverse traffic environments 2021 [41] Vehicle state, driver operations, and environmental data Improved IOHMM Lacks validation under real-world driving environments Addresses IOHMM limitations in sequential memory and continuous outputs 2021 [44] High D GMM-HMM Does not consider applicability in mixed traffic flows Identifies spatiotemporal interactions and high-risk patterns in lane changes 2023 [45] Deep learning-based methods
-
Deep learning can handle nonlinear problems in complex, high-dimensional time series, extracting lane change decision information from human driving data and capturing uncertainties in dynamic traffic. Xie et al.[46] combined a deep belief network (DBN) with an LSTM network to predict vehicle lane changes, identifying the relative position of the preceding vehicle as the key factor. However, the model did not incorporate personalized modeling of driver heterogeneity. Considering that multi-vehicle interactions affect the safety of lane change decisions, Qie et al.[47] proposed a decision-making approach that integrates LSTM with Graph Neural Networks (GNN) to model multi-vehicle interactions, as illustrated in Fig. 7. The method takes vehicles' historical trajectories as input, where the LSTM layer captures temporal dependencies in the trajectories and encodes the potential driving behavior of each vehicle. Meanwhile, the GNN layer models interactions among multiple vehicles, including not only those between the AVs and surrounding vehicles (SVs), but also interactions among SVs themselves. Finally, the output of the GNN layer is fed into a SoftMax layer to make lane change decisions. Experimental results demonstrate that, compared with the conventional LSTM-based method, this approach improves lane change decision accuracy by 19.8%.
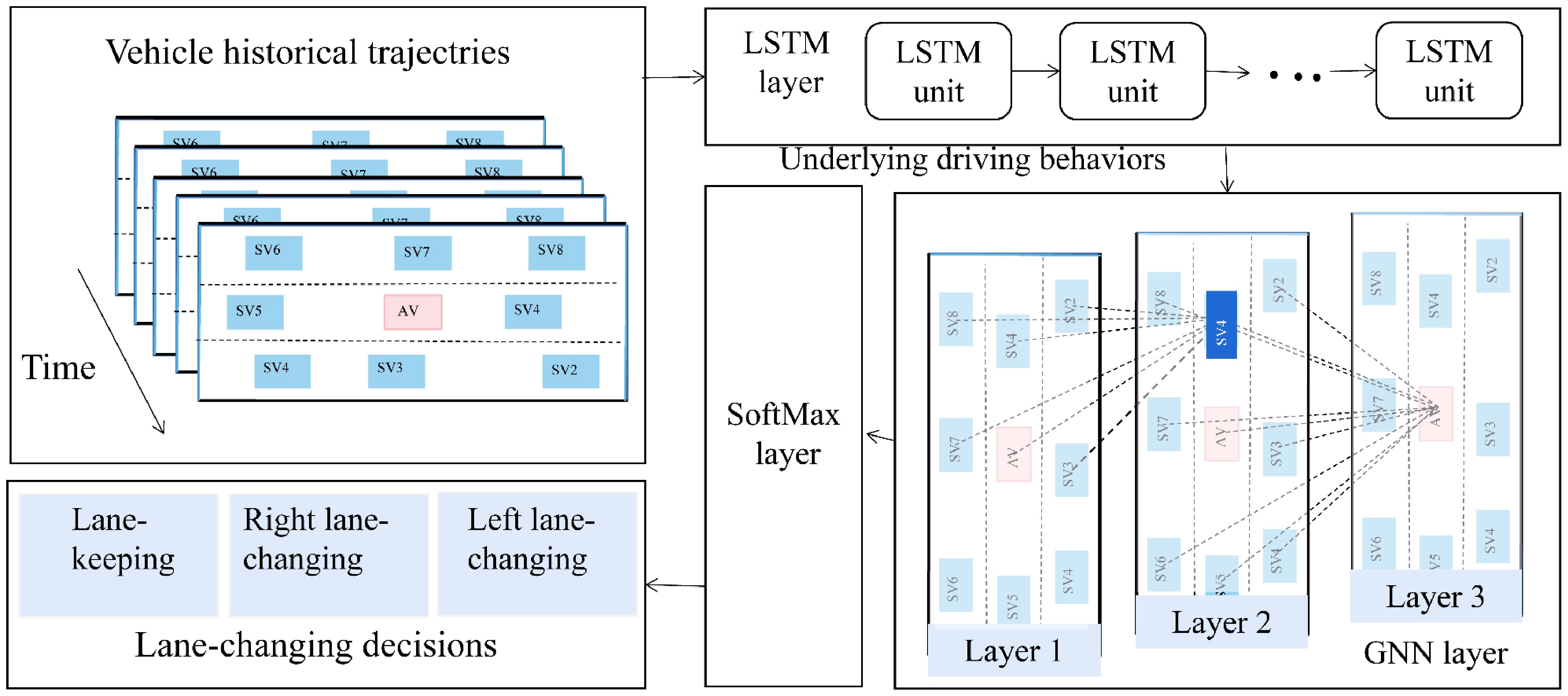
Figure 7.
LSTM-GNN network architecture. 'sv1–sv8' respectively represent different surrounding vehicles.
To improve decision performance, researchers have developed various innovative approaches. Cheng et al.[48] proposed a CNN-based lane change decision method using dynamic motion image representation, which enhances decision accuracy by integrating multi-vehicle interaction information and safety constraints. However, it ignores the temporal relationships between frames, limiting prediction accuracy. Han et al.[49] designed an end-to-end deep learning framework based on a temporal and spatial attention mechanism. By combining Squeeze-and-Excitation Network, ConvLSTM, and CNN structures, temporal attention is used to capture short- and long-term memory in visual information, while spatial attention identifies key objects and their locations in images, improving both prediction accuracy and model interpretability. To address the issue of high computational cost, Li et al.[50] developed a lightweight end-to-end lane change decision model based on Transformer. By incorporating depth-wise separable convolutions and Transformer modules, the lightweight network extracts image semantics from the temporal sequence of trajectory data, thereby reducing computational overhead. Table 4 summarizes deep learning-based approaches in data-driven lane change decision-making.
Table 4. Lane change decision method based on deep learning.
Input variables Algorithm Issues Advantages Year Ref. NGSIM database DBN-LSTM Lacks dynamic modeling of driving styles Simulate the entire lane changing process and its impact on traffic flow 2019 [46] NGSIM database LSTM-GNN Ignores key behavioral features; simplified interaction modeling Fully models multi-vehicle interactions, significantly improving decision accuracy 2023 [47] Dynamic motion images CNN-based dynamic motion image representation Limited generalization to real-world scenarios and high computational cost Captures surrounding vehicles' positions and motion comprehensively 2023 [48] Comma2k19 and Udacity datasets Spatiotemporal attention-based deep learning Complex model, long training time Spatiotemporal attention highlights important frames and key regions 2022 [49] Vehicle state space and action space DSCNN- Transformer Not suitable for complex urban roads Maintains temporal modeling capability while reducing computational load 2023 [50] Reinforcement learning-based methods
-
Reinforcement learning (RL) enables an agent to continuously interact with its environment and learn an optimal policy based on cumulative reward feedback. Its core idea is similar to human trial-and-error learning, requiring no manual labeling of data, and it can effectively overcome the limitations of deep learning imposed by training sample constraints[51]. Although RL can adapt to complex traffic environments and make real-time driving decisions, its performance heavily depends on the quality and quantity of the training dataset, necessitating model optimization for practical applications.
Considering the uncertainty and complexity of the driving environment during lane changes, Yavas et al.[52] proposed a lane change decision model based on Rainbow Deep Q-Network(DQN). The model is trained using a reward function provided by a safety layer, and simulation results show good applicability in dynamic, uncertain, and noisy highway lane change scenarios. Li et al.[26] combined deep reinforcement learning with a risk assessment function, evaluating driving risk using position uncertainty and distance-based safety metrics to find a strategy with minimum expected risk, thereby generating robust and safe lane change decisions. However, lane change decision-making must balance safety with other objectives. Peng et al.[53] proposed a double-layer decision model based on deep reinforcement learning, simultaneously considering driving efficiency, safety, and comfort, and capable of handling large-scale mixed state spaces while ensuring composite actions for vehicle following and lane change. Ran et al.[54] addressed the safety challenges of lane change in dense highway traffic and proposed a dense reinforcement learning approach based on DQN and prioritized experience replay (PER). However, the approach did not take into account mixed traffic flow conditions.
To address the insufficient interaction and cooperation capabilities among vehicles in complex traffic environments, Wang et al.[55] proposed a lane change model based on DRL, training AVs to perform lane changes while interacting with diverse human driving behaviors. Liang et al.[56] proposed a framework integrating behavior decision-making, path planning, and motion control. The framework leverages a bootstrapped DQN to enhance exploration in reinforcement learning and applies inverse reinforcement learning (IRL) to derive reward functions from human driving data for human-like path generation. To ensure safe under perception uncertainty, He et al.[57] proposed a robust lane change decision-making model based on observation adversarial reinforcement learning (OARL). Lane changing behavior is modeled using a constrained observation-robust Markov decision process, and a Bayesian-optimized black-box attack technique is employed to approximate optimal adversarial observation perturbations. Furthermore, a constrained observation-robust actor-critic algorithm is introduced to optimize lane change strategies and enhance robustness. Li et al.[58] incorporated a multi-head self-attention mechanism within the twin delayed deep deterministic policy gradient (TD3) framework to extract traffic flow features. A mixed action representation mechanism is used to coordinate longitudinal acceleration control and lateral lane change decisions, and attention outputs are integrated to stabilize strategy shifts. Table 5 summarizes reinforcement learning-based approaches in data-driven lane change decision-making.
Table 5. Lane change decision method based on reinforcement learning.
Input variables Algorithm Issues Advantages Year Ref. Relative positions and speeds of vehicles Rainbow DQN Unable to jointly optimize longitudinal speed and lane changing timing Introduces a safety feedback reward mechanism 2020 [52] Longitudinal/lateral distances, yaw angle, relative distances DRL + Risk assessment function Ignores driving styles; model applicability is limited to specific Achieves optimal driving strategy with minimum expected risk 2022 [26] US-101 NGSIM database D3QN+DDPG Fails to consider trajectory continuity and heterogeneous traffic flow Safely and efficiently handles lane changing and car-following behaviors 2022 [53] High D dataset DRL Limited application scenarios; reward function lacks consideration of comfort Incorporates a collision-avoidance strategy to ensure longitudinal safety 2023 [55] Relative distance, relative speed, and lane-relative position DQN + IRL High computational complexity and depends on expert data from driving simulators Integrates behavior, planning, and control modules for joint training and execution 2025 [56] Ego vehicle's longitudinal acceleration, yaw rate, surrounding vehicles' speeds and distances OARL Limited by discrete actions; cannot handle continuous steering control Maintains high performance and safety under observation disturbances 2023 [57] Vehicle position, speed, acceleration, and traffic light information AH-TD3 Lacks timeliness and poor continuity in modeling interactive behavior Mixed action representation integrates discrete and continuous actions 2024 [58] Game theory-based lane change decision-making
-
Game theory-based decision-making methods address behavioral decision-making in complex traffic scenarios by modeling the ego vehicle and surrounding vehicles as strategic agents. The fundamental objective of this approach is to mathematically formulate the interaction between the ego vehicle's maneuvering intentions and the yielding or adversarial responses of surrounding vehicles. These models aim to achieve either individual utility maximization within non-cooperative contexts or collective system optimization in cooperative scenarios. Game theory enables a rational analysis of influencing factors and the intrinsic nature of cooperation and competition among multiple vehicles. Moreover, game-theoretic approaches offer robustness in handling strategy selection under uncertainty and incomplete information. Consequently, game-theoretic frameworks have been extensively integrated into lane change decision protocols to augment the intelligence and safety of automated driving systems.
Game theory can capture the interactions between vehicles and execute corresponding control actions. Kita[59] proposed a game-theoretic model to analyze the interactions between merging and straight-going vehicles. The interaction was formulated as a two-player non-zero-sum non-cooperative game, where the vehicle predicts the opponent's behavior to select its optimal strategy. Meng et al.[60] developed a dynamic lane change decision model by incorporating predictability into game theory. In this model, game participants rely not only on real-time environmental perception but also on feasible prediction of future environmental information. Based on multi-player dynamic game theory, Yu et al.[61] proposed a lane change decision model for AV in mixed traffic environments, introducing an overtaking expectation parameter to estimate the utility of following vehicles. In human-machine mixed traffic, vehicle interactions inevitably affect efficiency and safety. Fu et al.[62] integrated the theory of perceived risk fields to quantify the driving risks induced by the uncertainty of HVs. The multi-vehicle conflict problem was decomposed into multiple two-vehicle lane-changing games, which improved both efficiency and safety. Deng et al.[63] proposed an incomplete-information game model based on the concept of driver aggressiveness. A risk–response map was developed to quantify social driving preferences, and naturalistic driving data from the high D dataset were used to train a GMM for risk estimation. This approach enabled adaptive and human-like decision-making in real-world interactive driving scenarios. However, some existing studies neglect differences in driving styles among interacting vehicles. To overcome this limitation, Huang et al.[64] developed a variable-structure game model that incorporates diverse driving styles. Based on relative driving style (RDS), the model dynamically adjusts its structure and achieves an average decision accuracy of 98%, outperforming conventional game-theoretic algorithms.
To enhance the flexibility of lane change decisions in traffic flow environments, Lu et al.[65] proposed a game-theoretic model that integrates lane change interactions with traffic flow trends. The model combines nonlinear autoregressive neural networks with Gaussian Mixture Models and Hidden Markov Models to predict both longitudinal and lateral driving intentions, while also accounting for interactions with surrounding vehicles and future traffic flow trends. Yao et al.[66] developed a lane change decision system based on an improved Stackelberg game and traffic flow information. As shown in Fig. 8, the system consists of three modules: lane changing demand assessment, lane changing condition evaluation, and a multi-lane game model. The demand function considers urgency and potential, while condition evaluation ensures safety using minimum lane changing distance. The multi-lane game model dynamically selects participants to handle complex interactions. Experimental results verified the system's foresight and the rationality of its decision-making. Table 6 summarizes game theory-based lane change decision methods. In contrast to methodologies reliant on predefined rules or empirical data patterns, game-theoretic approaches exhibit superior generalization capabilities across heterogeneous traffic scenarios. By simulating vehicle interactions and conflict characteristics, while also accounting for driving traits and driver preferences, they can effectively meet the decision-making requirements of AVs in complex and dynamic environments. Moreover, compared with reinforcement learning, game theory–based decision-making offers greater interpretability and scalability. Nevertheless, contemporary research confronts significant impediments, including high computational complexity in high-dimensional games, computational latency, and potential instability in the convergence of long-term strategic equilibria.
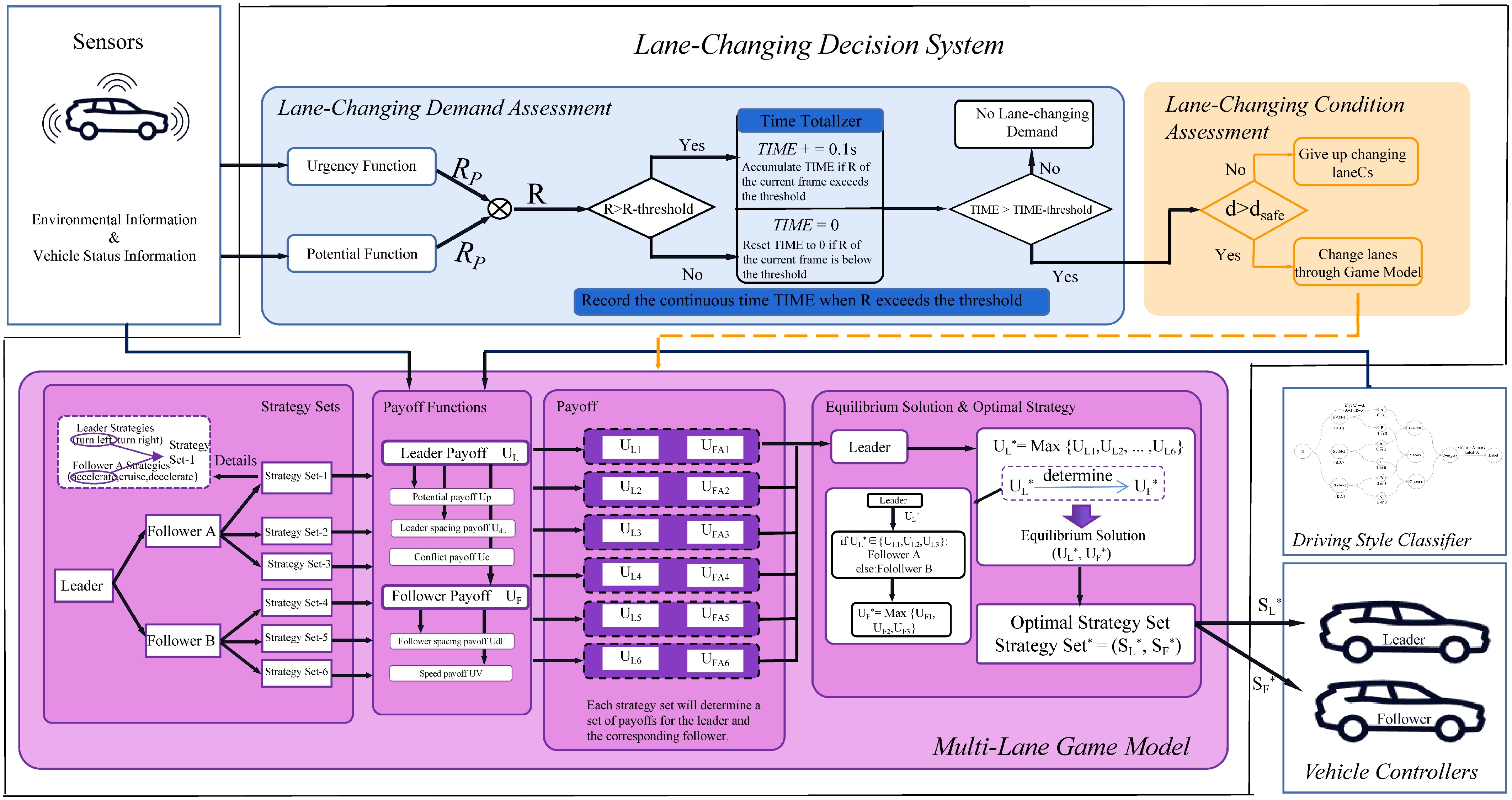
Figure 8.
Lane change decision system.
Table 6. Decision-making method for lane change based on game theory.
Input variables Algorithm Issues Advantages Year Ref. Traffic conflict indicators Two-player non-zero-sum non-cooperative game Oversimplified assumptions underestimate real-road complexity Demonstrates feasibility of applying game theory to traffic interaction modeling 1999 [59] Vehicle state information Stackelberg Game with Incomplete Information Relies on sensor data, subject to perception errors Capable of handling uncertainty and enabling dynamic decision updates 2016 [60] Vehicle state and environmental information Non-cooperative mixed-strategy game Insufficient consideration of driving style diversity Incorporates a dynamic risk model into the lane changing game 2022 [61] Vehicle state information and driving style parameters Coalition game model High computational complexity; relies on stable V2X communication Introduces perceived risk field theory to quantify uncertainties in mixed traffic 2023 [62] High D dataset Incomplete information game Overemphasis on human driving uncertainty while ignoring vehicle dynamics constraints Uses Risk–Response (R-R) diagram to interpretively quantify social driving preferences 2024 [63] NGSIM dataset Hierarchical game theory model Assumes fully rational vehicles, while real-world mixed traffic is not fully rational Dynamically selects game model based on RDS 2024 [64] Vehicle status information and traffic trend prediction data Prediction-enhanced game theory model Oversimplified scenarios, only two-vehicle games are considered while real lane changes involve multi-vehicle interaction Utilizes macroscopic traffic flow information for proactive decision-making 2024 [65] US-101 NGSIM database Improved Stackelberg game theory Ignores multi-lane continuous lane changing demand; insufficient safety mechanisms Strong adaptability in multi-lane scenarios with online real-time classification of driving styles 2025 [66] -
The rapid advancement of artificial intelligence and autonomous driving technologies has catalyzed the emergence of mixed human–vehicle traffic environments. This paradigm shift imposes increasingly stringent requirements regarding the safety and reliability of lane change decisions. Consequently, critical scholarly attention must be directed toward the impact of human–vehicle interactions and heterogeneity in driving styles. While human drivers rely on subjective experience, AVs depend on structured data, creating fundamental differences in decision logic. Against this background, this paper systematically reviews lane changing behavior, risk assessment methods, and decision-making models in mixed traffic.
Regarding the analysis of lane changing behavior and risk assessment, this study delineates the distinction between discretionary and mandatory lane changes, while introducing multi-stage process models to establish a coherent framework for analyzing dynamic interactions. To address safety concerns within heterogeneous traffic flow, a spectrum of risk assessment methodologies is critically reviewed, significantly augmenting the capacity for the quantitative analysis of lane change safety. At the level of lane change decision-making models, this paper comprehensively scrutinizes rule-based, reinforcement learning, deep learning, and game-theoretic approaches, providing a detailed comparative analysis of their respective merits and limitations. Through this systematic review, the study identifies current challenges and outlines future research directions.
Limited consideration of human–machine interaction in lane change decisions
-
In mixed human–machine driving environments, existing lane change decision-making models often fail to account for the influence of human–machine interaction, which may result in inaccurate decisions or even safety risks. The limitations of current models are particularly evident in three aspects. First, human drivers frequently exhibit non-rational behaviors influenced by experience, emotion, and other subjective factors, which traditional models struggle to capture. Second, autonomous driving systems face challenges in quantifying latent states, such as a driver's psychological condition or reaction latency, in real time. Furthermore, during the information transmission process between vehicles, there is a difference in the coexistence of structured communication and unstructured perception. This makes it difficult for AVs to accurately infer human drivers' true intentions, leading to misjudgments or overly conservative decisions during critical lane change moments.
Future research may adopt multimodal perception fusion by integrating V2X communication, eye-tracking data, and multi-source environmental sensing. This approach can enhance the detection of non-rational driver behavior and support the development of intention-recognition models for human–machine cooperative lane changing. GNNs can be used to model traffic scenes as heterogeneous graphs, where nodes represent vehicles, drivers, and road elements, and edges capture their interactions. This approach helps capture close inter-vehicle interactions. Combining GNNs with attention mechanisms can further highlight the key interacting vehicles that influence lane changing and improve the accuracy of behavior and intention prediction. In addition, Inverse Reinforcement Learning (IRL) can be used to learn the underlying reward functions from cooperative human driving behavior. Deep Reinforcement Learning (DRL) can then train AVs to generate optimal interaction strategies, enabling them to communicate intentions effectively through behavioral interaction in simulation environments and complete lane changes successfully.
Challenges in multi-vehicle coordination and dynamic environment modeling
-
Current research largely focuses on single-vehicle decision-making and often overlooks multi-vehicle cooperation and system-level optimization. In mixed traffic, AVs and HVs engage in complex dynamic game interactions. Existing models simplify these interactions excessively, which may lead to locally optimal decisions and reduced global efficiency. In addition, these models have limited ability to capture abrupt traffic flow changes or dynamic obstacles, negatively affecting both safety and efficiency.
Future work should strengthen multi-vehicle cooperation and account for dynamic traffic flow variations to improve lane change prediction accuracy. By integrating V2X communication with event-triggered learning, real-time information sharing, and rapid policy updates can be achieved. Through the Internet of Vehicles, vehicle state information can be shared in real time, while an event-triggered MARL mechanism activates learning and communication only when critical state changes or potential conflicts arise. This reduces communication redundancy and improves decision response speed. In addition, coalition games and hierarchical control mechanisms can be introduced. At the upper level, traffic flow is optimized as a whole by establishing cooperative relationships among vehicles through coalition game models, enabling dynamic platoon formation and task allocation. At the lower level, distributed control algorithms coordinate local safety distances, acceleration and deceleration behaviors, and lane change timing to ensure individual safety. This two-level framework helps maintain overall stability and traffic efficiency in complex traffic flows. Building a multi-agent reinforcement learning (MARL) framework can further support coordinated strategies. By training fleets of AVs on large-scale simulation platforms and designing appropriate reward functions, vehicles can learn not only individual lane change maneuvers but also behaviors that enhance overall traffic stability and efficiency.
Data dependency and constraints on generalization
-
Data-driven lane change decision models generally rely on mining lane change patterns from large-scale driving behavior datasets. However, existing datasets often suffer from annotation bias and insufficient scene coverage, resulting in poor adaptability to complex traffic environments and difficulty in handling diverse traffic patterns or unexpected events. To address these issues of data dependency and poor generalization, physics-informed augmentation and virtual data synthesis can be employed to expand the training sample distribution. Virtual samples that comply with vehicle dynamics constraints can be generated on top of real data. By combining physics-consistent generation with simulation–real data fusion, multi-scenario, multi-weather, and multi-style driving datasets can be produced, enhancing model coverage and robustness. In addition, semi-supervised, self-supervised, and transfer learning strategies can reduce reliance on large-scale labeled data. For example, self-supervised pretraining can extract general spatiotemporal features, which can then be fine-tuned on a small set of labeled samples, lowering manual annotation costs. Domain-adaptive transfer techniques further ensure consistent model performance across urban roads, highways, and congested environments. Integrating prior knowledge, such as traffic rules and vehicle dynamics, into the model can prevent it from relying solely on superficial correlations in the data, thereby improving interpretability.
By reviewing existing research progress, this paper identifies the core challenges related to human–machine interaction, multi-vehicle coordination, and data generalization in mixed traffic. It further proposes feasible improvement strategies. The goal is to provide theoretical support and technical pathways for developing lane change decision systems that are safer, more efficient, and more interpretable, thereby promoting the continuous evolution of vehicle decision-making capabilities in mixed traffic environments.
This work is supported by the research project on urban intersection control methods under Intelligent Connected Vehicle Environments (Grant No. H2024-107).
-
The authors confirm contribution to the paper as follows: study conception and design: Fang H, Huang Z; methodology: Fang H, Huang Z, Lin Y, Hu X; formal analysis: Huang Z, Hu X; investigation: Fang H, Lin Y; resources: Fang H, Lin Y; data curation: Fang H, Lin Y; draft manuscript preparation: Fang H, Huang Z. All authors reviewed the results and approved the final version of the manuscript.
-
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
-
The authors declare that they have no conflict of interest.
- Copyright: © 2025 by the author(s). Published by Maximum Academic Press, Fayetteville, GA. This article is an open access article distributed under Creative Commons Attribution License (CC BY 4.0), visit https://creativecommons.org/licenses/by/4.0/.
-
About this article
Cite this article
Huang Z, Fang H, Lin Y, Hu X. 2025. A review of vehicle lane change decisions in human–machine mixed driving environments. Digital Transportation and Safety 4(4): 298−311 doi: 10.48130/dts-0025-0028 

A review of vehicle lane change decisions in human–machine mixed driving environments
- Received: 23 July 2025
- Revised: 20 November 2025
- Accepted: 08 December 2025
- Published online: 31 December 2025
Abstract: With the development of autonomous driving technology, the human–machine mixed driving environment has become the predominant form of future road traffic. This paper presents a systematic review of lane change decision-making in mixed driving scenarios. First, the behavioral characteristics of discretionary and mandatory lane changes are analyzed, and the lane change process is divided into decision-making and execution stages. From the perspective of driving safety, the importance of behavior prediction and risk assessment in ensuring the safety of decision-making is emphasized. It comprehensively reviews existing lane change risk evaluation methods, including probabilistic models and traffic conflict indicators, aiming to reduce traffic accidents caused by hazardous lane change behaviors through accurate risk evaluation. Then, through the analysis of existing lane change decision models, they are categorized into three major types: rule-based, data-driven, and game theory-based models. From the perspectives of input features and applied algorithms, the advantages, limitations, and applicable scenarios of models are compared and analyzed. Finally, current shortcomings and challenges are discussed. Key issues include insufficient consideration of human–machine interactions, low efficiency in multi-vehicle coordination, and high dependency on data. Future research directions are proposed to address these challenges. This study provides theoretical support for constructing safe and efficient lane change decision models in mixed traffic environments.