








-
In recent years, the National Development and Reform Commission, the Cyberspace Administration of China (CAC), and 11 other departments have issued The Strategy for Innovative Development of Intelligent Vehicles[1], and the General Office of the Ministry of Transport has issued The Guidelines on Transport Safety Services of Autonomous Vehicles (Trial Implementation)[2]. This clearly indicates that autonomous driving, driven by artificial intelligence, is a global innovation hotspot and an aim for future development. With the development of science and technology, the development and popularization of autonomous vehicles is expected to reduce traffic accidents[3], to improve traffic efficiency[4,5], and to reduce traffic emissions[6,7]. Artificial intelligence has opened new possibilities for optimizing traffic operations[8]. Autonomous driving is classified into six levels based on the degree of automation: L0 (no driving automation), L1 (driver assistance), L2 (partial driving automation), L3 (conditional driving automation), L4 (high driving automation), and L5 (full driving automation)[9]. At present, autonomous driving technology has developed to L4, while L2 and L3 have become mature. However, due to immature technology and imperfect laws and regulations, there must be human-driven vehicles and different grades of autonomous vehicles in road traffic systems during a long period before fully autonomous driving is realized.
Driving decision is the key to ensuring that autonomous vehicles can accurately and smoothly complete various driving tasks[10], and a very important decision of a vehicle is a lane-changing decision. Most of the existing studies on vehicle lane-changing decision-making focus on theoretical and practical discussions such as logical rules, machine learning, and game theory. Lane-changing models based on logical rules make decisions according to lane-changing intentions and conditions. These models have a simple structure and clear logic. The earliest rule-based lane-changing model was put forward by Gipps[11]. Later, some scholars improved safety constraints[12] and lane-changing benefits[13], but such models fail to reflect the interaction between vehicles during lane-changing, and their decision-making accuracy relies on rule settings, which lack sufficient flexibility and struggle to adapt to complex traffic environments[14].
Many scholars have begun using machine learning to train models on large-scale datasets, optimizing lane-changing models for vehicles to adapt to more complex traffic environments and enhance the accuracy of both decision-making and recognition[15]. Mahajan et al.[16] built an end-to-end machine learning model, which effectively captures the motivation of lane-changing for vehicles. On this basis, some scholars have proposed the MSIF-DRL strategy based on deep reinforcement learning and multi-source information fusion[17,18], as well as a reward function model for neural network training[19], thereby improving the efficiency and environmental adaptability of vehicle lane-changing decision-making. However, such models rely on large amounts of high-quality training data, which makes the modeling process complicated, parameters calibration difficult, and generalization to unknown scenarios limited[20−23].
As an effective modeling tool, game theory can simulate and analyze the interactive behaviors and decision-making processes between human-machine co-driving vehicles[24]. In recent years, many scholars have thoroughly explored lane-changing decision-making based on game theory. In the existing studies, the classical game theory constructs an interactive decision-making framework between vehicles through the collision time, acceleration utility, conflict risk, and other factors, and realizes the optimization of lane-changing strategy[25−27]. It also introduces several methods, such as a quantum reaction equilibrium framework and receding horizon control[28], which provide new perspectives on the application of game theory in autonomous driving. However, these studies assume that any driver is completely rational, which is inconsistent with the reality that any driver has limited rationality, and the decision is easily affected by fatigue, or other factors in a real driving environment. To overcome such problems in the classical game theory, some researchers put forward the lane-changing decision of autonomous vehicles based on the evolutionary game[29,30]. In the aspect of the consideration of drivers' utilities, most studies consider three utilities, i.e., safety, efficiency, and comfort[31,32], which more exactly describe the decision metrics.
Nevertheless, there are still some problems with the existing research. First, an adaptive framework is not designed for the human-machine co-driving scenarios, which cannot consider the heterogeneous decision-making needs of human-driven vehicles and autonomous vehicles. Second, although the existing research has made progress in the consideration of drivers' utilities, it ignores the key factors that affect the rationality of decision-making[33−35], which leads to the incomplete design of utility functions, and the deviation between theoretical and real decision-making results. To solve such problems, the utilities and utility functions of human-driven vehicles and autonomous vehicles are described, and the heterogeneous decision-making and dynamic interaction behaviors of these two types of vehicles are further accurately expressed. At the same time, the evolutionary game model of lane-changing of human-driven or autonomous vehicles is formulated by integrating the safety, efficiency, comfort, fatigue, and energy-saving utilities, so that autonomous vehicles can adjust their lane changing strategies in real-time according to the surrounding environments. Thus, the performance of the human-machine co-driving system can be enhanced.
-
Based on evolutionary game theory, this paper aims at formulating an evolutionary game model to support the lane-changing decision-making of autonomous vehicles. The lane-changing decision-making process is shown in Fig. 1. Firstly, lane-changing vehicles (LVs) acquire the information of vehicles involved in the target lane and identify the game counterparts to form games. Then, LVs calculate the utilities of all the corresponding strategies. Next, LVs obtain the Nash equilibrium of the mixed-strategy game via the game analysis. Finally, LVs make decisions based on the Nash equilibrium.
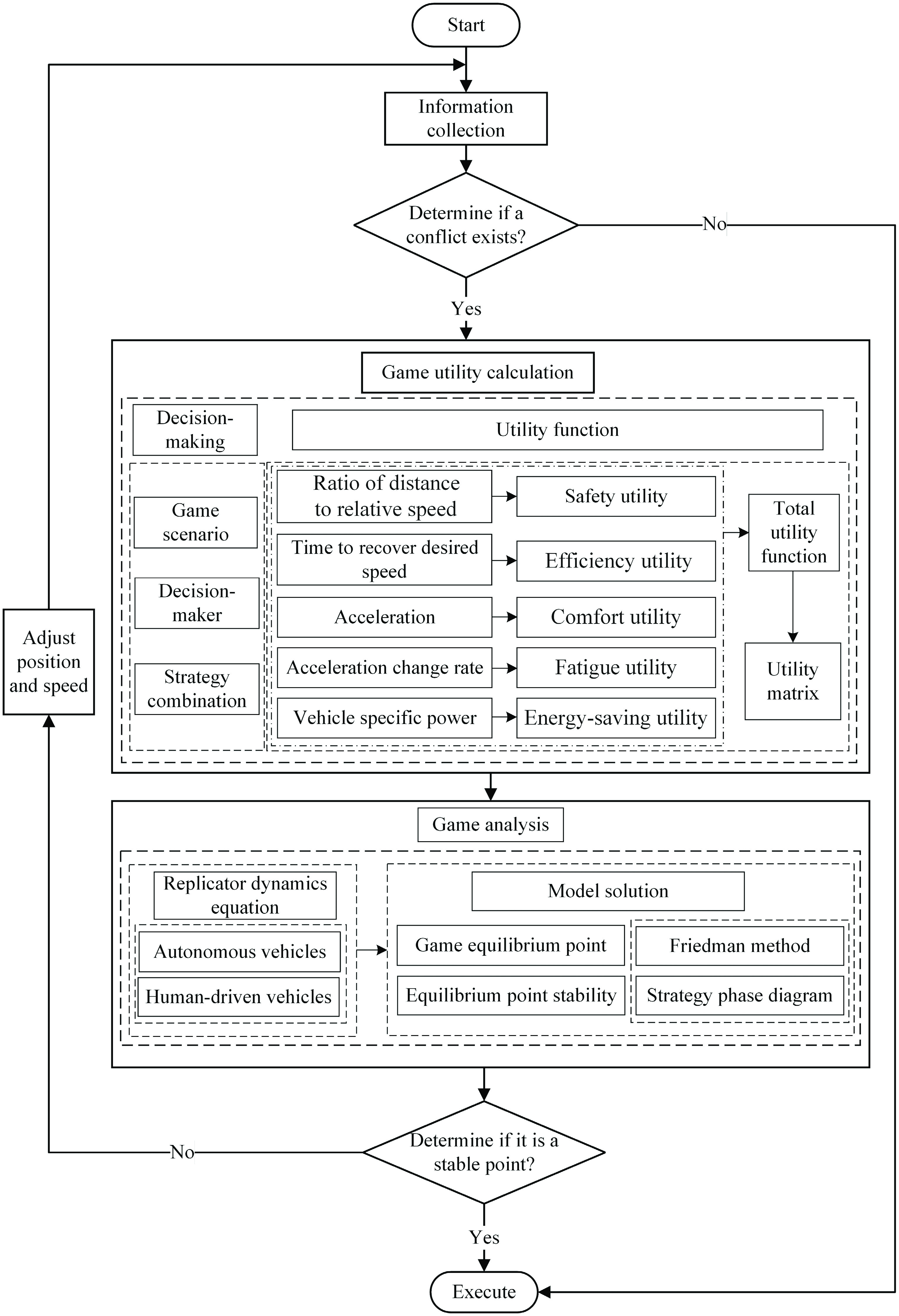
Figure 1.
Flowchart of lane changing decision-making.
Game scenarios
-
On one-way two-lane roads, if the utilities of vehicles on the current lane are lower than those on the target lane, the vehicles will conduct lane-changing decision analyses based on the running states of themselves and their surrounding vehicles to decide whether to change lanes to the target lane. At this time, the vehicles on the current lane are LVs, and the vehicles behind them on the target lane (TL) are target vehicles (TVs).
If the behavioral decisions of LVs and TVs can be accurately predicted, the game between LVs and TVs will not exist. As shown in Fig. 2a, if LVs have started to change lanes and occupied the target lane, TVs can only give way while LVs continue to complete lane-changing, and there is no game between them. As shown in Fig. 2b, if TVs are far from LVs, TVs have not yet entered the conflict zone, LVs perform lane-changing operations, and TVs run normally without stopping or slowing down. At this time, the game between LVs and TVs does not also exist. Beyond these two situations, a game occurs between LVs and TVs.
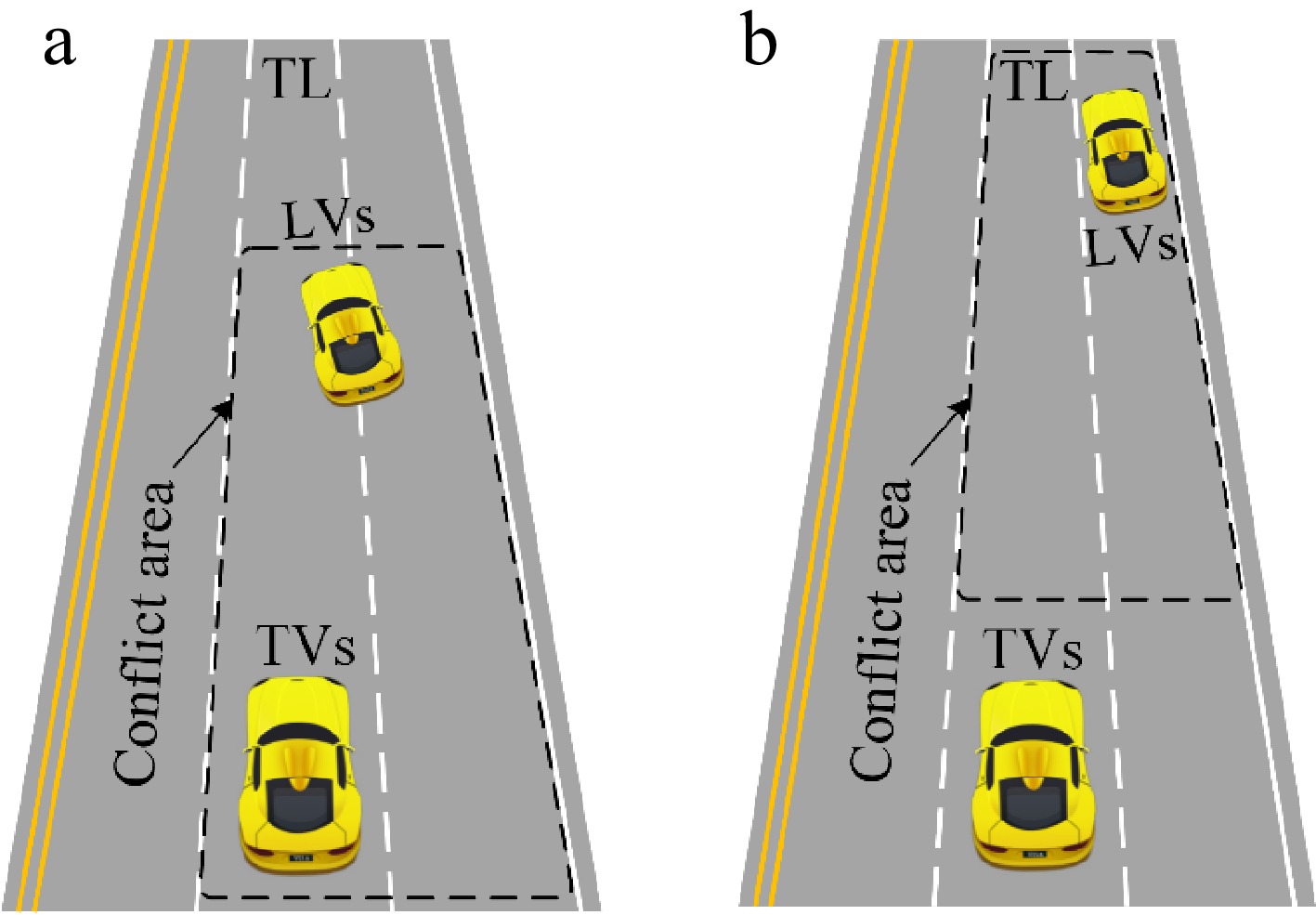
Figure 2.
No-game scenarios between LVs and TVs.
Since human-driven vehicles and autonomous vehicles will coexist in the road traffic system during a long period, this study focuses on four lane-changing scenarios involving different combinations of human-driven vehicles and autonomous vehicles to align closely with real traffic operations during the transition period from human-driven to fully autonomous driving. Considering that both LVs and TVs can be either autonomous vehicles or human-driven vehicles, the game scenarios for vehicle lane-changing are divided into Scenario 1, Scenario 2, Scenario 3, and Scenario 4. As shown in Fig. 3, these are the four scenarios as follows:
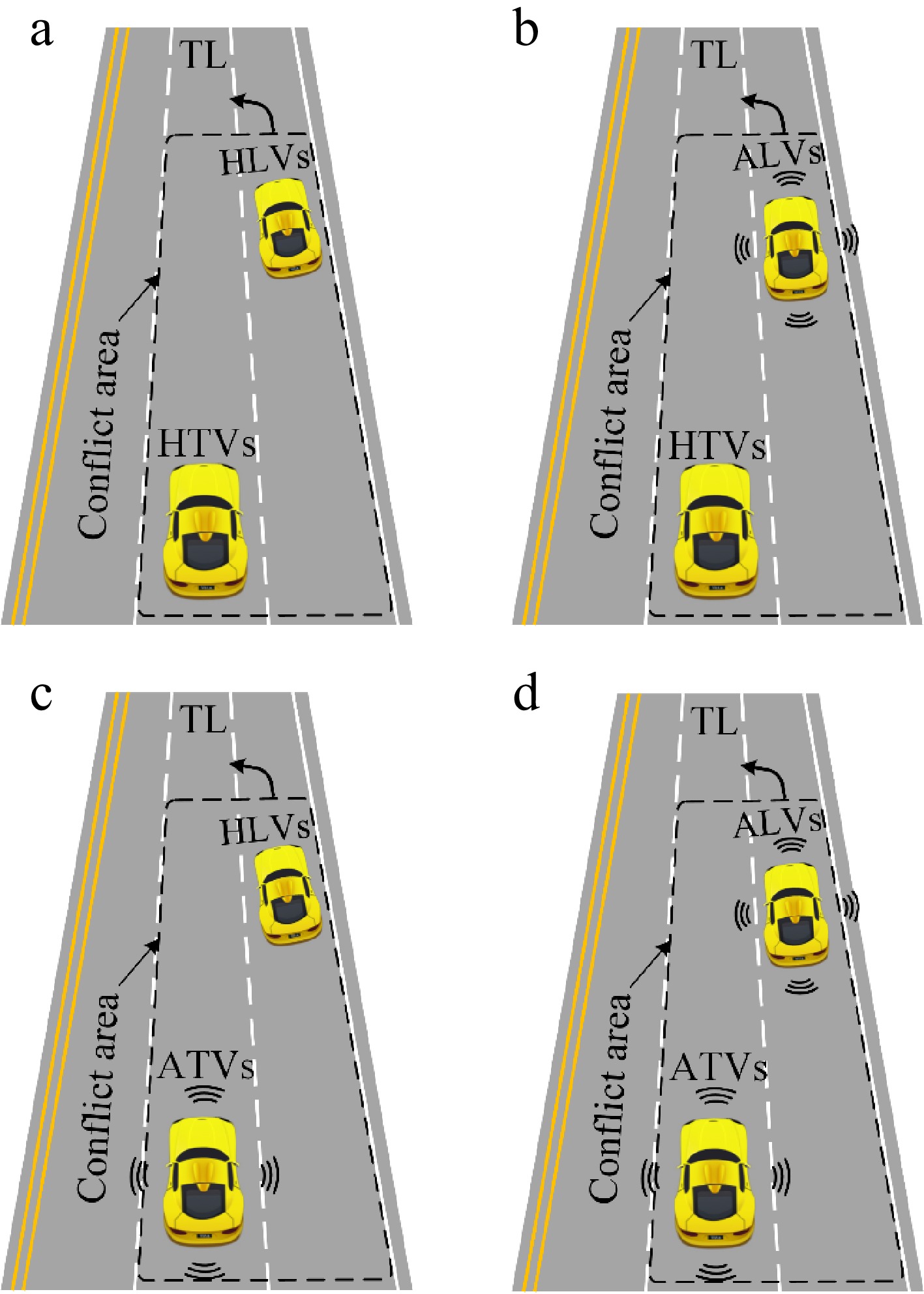
Figure 3.
Game scenarios between LVs and TVs.
Scenario 1: Game between human-driven lane-changing vehicles (HLVs) and human-driven target vehicles (HTVs).
Scenario 2: Game between HLVs and autonomous target vehicles (ATVs).
Scenario 3: Game between autonomous lane-changing vehicles (ALVs) and HTVs.
Scenario 4: Game between ALVs and ATVs.
The four scenarios are mainly used to explain the lane-changing behaviors on urban expressways. However, they can be used for urban streets, highways or freeways directly or indirectly. The basic assumption of this study is that there is no interference from traffic lights, pedestrians, or non-motor vehicles—the focus is on the game between motor vehicles.
Game elements
Decision-makers
-
Decision-makers are LVs and TVs, which are either autonomous vehicles or human-driven vehicles, that is, decision-makers N ∈ (HLVs, HTVs, ALVs, ATVs). Moreover, it is assumed that autonomous vehicles have full decision-making authority.
Strategy sets and strategy profiles of decision-makers
-
The strategy set of LVs is {Li|i = 1,2} = {lane-changing, not-lane-changing}, the strategy set of TVs is {Tj|j = 1,2} = {giving-way, not-giving-way}, and the strategy profiles of LVs and TVs are {(Li, Tj)|i,
$j\in $ Utility functions of decision-makers
-
The utilities of LVs and TVs mainly consider safety utilities, efficiency utilities, and comfort utilities. However, human-driven vehicles are prone to driver fatigue, while autonomous vehicles feature energy conservation and emission reduction. Therefore, in the lane-changing game process, the fatigue effect of human-driven vehicles and the energy-saving effect of autonomous vehicles are considered. In order to ensure traffic safety, the ratio of distance to relative speed of a vehicle is used to represent the safety utility S, the time required for vehicle speed to recover to the expected speed is used to represent the efficiency utility E, the change of acceleration is used to represent the comfort utility C, the change rate of acceleration is used to represent the fatigue utility F, and the specific power of a vehicle is used to represent the energy-saving utility ES[36,37]. Thus, the utility set is denoted by G ∈ (S, E, C, F, ES).
The utilities of a vehicle include the safety utility
$ U_{ij}^{N,\mathrm{S}} $ $ U_{ij}^{N,\mathrm{E}} $ $ U_{ij}^{N,\mathrm{C}} $ $ U_{ij}^{N,\mathrm{ES}} $ $ U_{ij}^{N,\mathrm{F}} $ $ U_{ij}^{N,\mathrm{S}}=\left\{\begin{aligned} & 0,\;\;\textit{N}\in (\mathrm{HLVs},\;\;\mathrm{ALVs})\wedge (i,j)=(1,1)\\ & 0,\;\;\textit{N}\in (\mathrm{HTVs},\;\;\mathrm{ATVs})\wedge (i,j)=(2,2)\\ & (-1)^{i}\dfrac{d}{\left| {v}_{\mathrm{L}}(t)-{v}_{\mathrm{T}}(t)\right| },\;\;\textit{N}\in (\mathrm{HLVs},\mathrm{ALVs})\wedge (i,j)\neq (1,1)\\ & (-1)^{j+1}\dfrac{d}{\left| {v}_{\mathrm{L}}(t)-{v}_{\mathrm{T}}(t)\right| },\;\;\textit{N}\in (\mathrm{HTVs},\mathrm{ATVs})\wedge (i,j)\neq (2,2) \end{aligned} \right.$ (1) $ U_{ij}^{N,\mathrm{E}}=\begin{cases} (-1)^{i+1}\left(2-j\right){T}^{\textit{N}}(t),\;\;\textit{N}\in (\mathrm{HLVs},\mathrm{ALVs})\\ (-1)^{j}\left(i-1\right){T}^{\textit{N}}(t),\;\;\textit{N}\in (\mathrm{HTVs},\mathrm{ATVs}) \end{cases}$ (2) $ U_{ij}^{\textit{N},\mathrm{C}}=\begin{cases} (-1)^{i+1}\left(2-j\right){A}^{\textit{N}}(t),\;\;\textit{N}\in (\mathrm{HLVs},\mathrm{ALVs})\\ (-1)^{j}\left(i-1\right){A}^{\textit{N}}(t),\;\;\textit{N}\in (\mathrm{HTVs},\mathrm{ATVs}) \end{cases} $ (3) $ U_{ij}^{N,\mathrm{F}}=\begin{cases} 0,\;\;\textit{N}\in (\mathrm{ALVs},A\mathrm{TVs})\\ -\dfrac{|{A}_{\textit{N}}(t+nf)-{\mathrm{A}}_{\textit{N}}(t)|}{nf},\;\;\textit{N}\in (\mathrm{HLVs},\mathrm{HTVs}) \end{cases}$ (4) $ U_{ij}^{\textit{N},\mathrm{ES}}=\begin{cases} 0,\;\;\textit{N}\in (\mathrm{HLVs},\mathrm{HTVs})\\ \left(2-j\right)P_{\textit{b}}^{\textit{N}}(t),\;\;{\textit{N}}=\mathrm{ALVs}\\ \left(i-1\right)P_{\textit{b}}^{\textit{N}}(t),\;\;{\textit{N}}=\mathrm{ATVs} \end{cases} $ (5) where,
$ \wedge $ $ \vee $ $ P_{\text{b}}^{N}(t) $ Because the dimensions of the safety utility, efficiency utility, comfort utility, fatigue utility, and energy-saving utility are all different and cannot be added directly, the utilities are standardized from minimum to maximum, and the standardized utility
$ _{_{ }}U_{ij,\mathrm{AN}}^{N,G} $ $ U_{ij,\mathrm{AN}}^{N,G}=\left\{\begin{aligned} & \dfrac{1}{K}\sum\limits_{k=1}^K\dfrac{U_{ij,k}^{N,G}-\min\left\{U_{ij,k}^{N,G}\right\}}{\max\left\{U_{ij,k}^{N,G}\right\}-\min\left\{U_{ij,k}^{N,G}\right\}},\; \; U_{ij,k}^{N,G}\ge0 \\ & \dfrac{1}{K}\sum\limits_{k=1}^K\dfrac{U_{ij,k}^{N,G}-\max\left\{U_{ij,k}^{N,G}\right\}}{\max\left\{U_{ij,k}^{N,G}\right\}-\min\left\{U_{ij,k}^{N,G}\right\}},\; \; U_{ij,k}^{N,G} \lt 0\end{aligned}\right. $ (6) where,
$ U_{ij,k}^{N,G} $ The function of the total utility of a vehicle is as follows:
$ U_{ij}^N=U_{ij,\mathrm{AN}}^{N,\mathrm{S}}+U_{ij,\mathrm{AN}}^{N,\mathrm{E}}+U_{ij,\mathrm{AN}}^{N,\mathrm{C}}+U_{ij,\mathrm{AN}}^{N,\mathrm{F}}+U_{ij,\mathrm{AN}}^{N,\mathrm{ES}} $ (7) $ U_{ij}^{\mathrm{LVs}} $ $ U_{ij}^{\mathrm{TVs}} $ $ U_{ij}^{\mathrm{LVs}} $ $ U_{ij}^{\mathrm{HLVs}} $ $ U_{ij}^{\mathrm{ALVs}} $ $ U_{ij}^{\mathrm{TVs}} $ $ U_{ij}^{\mathrm{HTVs}} $ $ U_{ij}^{\mathrm{ATVs}} $ Table 1. Utility matrix of LVs and TVs.
LVs TVs Giving-way Not-giving-way Lane-changing $ (U_{11}^{\mathrm{LVs}},U_{11}^{\mathrm{TVs}}) $ $ (U_{12}^{\mathrm{LVs}},U_{12}^{\mathrm{TVs}}) $ Not-lane-changing $ (U_{21}^{\mathrm{LVs}},U_{21}^{\mathrm{TVs}}) $ $ (U_{22}^{\mathrm{LVs}},U_{22}^{\mathrm{TVs}}) $ Replicator dynamics equations
-
Let the proportions of LVs choosing the lane-changing strategy and the not-lane-changing strategy be p and 1 − p, respectively; and the proportions of TVs choosing the giving-way strategy and the not-giving-way strategy be q and 1 − q, respectively.
Replicator dynamics equation of LVs
-
The expected utilities of the lane-changing and not-lane-changing strategies for LVs respectively are as follows.
$ E_{1}^{\mathrm{LVs}}=qU_{11}^{\mathrm{LVs}}+\left(1-q\right)U_{12}^{\mathrm{LVs}} $ (8) $ E_{2}^{\mathrm{LVs}}=qU_{21}^{\mathrm{LVs}}+\left(1-q\right)U_{22}^{\mathrm{LVs}} $ (9) The average expected utility of LVs (ELVs) choosing the lane-changing and not-lane-changing strategies is shown in Eq. (10), and the replicator dynamics equation of LVs (FLVs(p,q)) is obtained as shown in Eq. (11).
$ \begin{split}{E}^{\mathrm{LVs}}=& pE_{1}^{\mathrm{LVs}}+qE_{2}^{\mathrm{LVs}}=\left(U_{11}^{\mathrm{LVs}}-U_{12}^{\mathrm{LVs}}-U_{21}^{\mathrm{LVs}}+U_{22}^{\mathrm{LVs}}\right)pq+\\ & \left(U_{12}^{\mathrm{LVs}}-U_{22}^{\mathrm{LVs}}\right)p+\left(U_{21}^{\mathrm{LVs}}-U_{22}^{\mathrm{LVs}}\right)q+U_{22}^{\mathrm{LVs}}\end{split} $ (10) $ {F}^{\mathrm{LVs}}(p,\textit{q})=\dfrac{\partial p}{\partial t}=p\left(1-p\right)\left[\left(U_{11}^{\mathrm{LVs}}-U_{12}^{\mathrm{LVs}}-U_{21}^{\mathrm{LVs}}+U_{22}^{\mathrm{LVs}}\right)q+U_{12}^{\mathrm{LVs}}-U_{22}^{\mathrm{LVs}}\right] $ (11) where, FLVs(p,q) stands for FHLVs(p,q) or FALVs(p,q).
Similarly, the replicator dynamics equation of TVs (FTVs(p,q)) can be obtained as shown in Eq. (12).
$ {F}^{\mathrm{TVs}}(p,\textit{q})=\dfrac{\partial q}{\partial t}=q\left(1-q\right)\left[\left(U_{11}^{\mathrm{TVs}}-U_{21}^{\mathrm{TVs}}-U_{12}^{\mathrm{TVs}}+U_{22}^{\mathrm{TVs}}\right)p+U_{21}^{\mathrm{TVs}}-U_{22}^{\mathrm{TVs}}\right] $ (12) Let
$ \Delta U_{i}^{\mathrm{LVs}} $ $i\in $ $ \Delta U_{1}^{\mathrm{LVs}}=U_{11}^{\mathrm{LVs}}- U_{21}^{\mathrm{LVs}} $ $ \Delta U_{2}^{\mathrm{LVs}}=U_{12}^{\mathrm{LVs}}-U_{22}^{\mathrm{LVs}} $ $ \Delta U_{\textit{j}}^{\mathrm{TVs}} $ $j\in $ $ \Delta U_{1}^{\mathrm{TVs}}=U_{11}^{\mathrm{TVs}}-U_{12}^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}}=U_{21}^{\mathrm{TVs}}-U_{22}^{\mathrm{TVs}} $ $ {F}^{\mathrm{LVs}}(p,\textit{q})=p\left(1-p\right)\left[\left(\Delta U_{1}^{\mathrm{LVs}}-\Delta U_{2}^{\mathrm{LVs}}\right)q+\Delta U_{2}^{\mathrm{LVs}}\right] $ (13) $ {F}^{\mathrm{TVs}}(p,\textit{q})=q\left(1-q\right)\left[\left(\Delta U_{1}^{\mathrm{TVs}}-\Delta U_{2}^{\mathrm{TVs}}\right)p+\Delta U_{2}^{\mathrm{TVs}}\right] $ (14) where, FLVs(p,q) stands for FHLVs(p,q) or FALVs(p,q).
-
By solving the differential Eq. (15) about p and q, composed of Eqs (13) and (14), five equilibrium points of the game between LVs and TVs can be obtained:
(0,0) (not-lane-changing, not-giving-way) is a steady state where the benefit of lane-changing is lower than its risk cost, with the core purpose of avoiding ineffective lane-changing. (1,1) (lane-changing, giving-way) represents the optimal cooperative steady state for vehicles; by balancing multi-dimensional utilities, it can be translated into improved traffic flow efficiency. (0,1) (not-lane-changing, giving-way) is a transitional equilibrium, reflecting that a decision-maker who choose giving-way fails to enable effective lane-changing. (1,0) (lane-changing, not-giving-way) is a conflict-oriented temporary equilibrium that only exists momently under specific initial conditions. Such a point confirms the unstable nature of conflict strategies and underscores the rigid demand of the safety utility in transportation systems. The mixed-strategy equilibrium (x, y) is a probabilistic steady state in uncertain environments, where x and y correspond to the probabilities of LVs choosing to change lanes and TVs choosing to give way. Where (x,y) =
$ (\dfrac{\Delta U_2^{\mathrm{TVs}}}{\Delta U_2^{\mathrm{TVs}}-\Delta U_1^{\mathrm{TVs}}},\dfrac{\Delta U_2^{\mathrm{LVs}}}{\Delta U_2^{\mathrm{LVs}}-\Delta U_1^{\mathrm{LVs}}}) $ $ \left\{\begin{aligned} & \partial \textit{p}/\partial \textit{t}=0\\ &\partial q/\partial \textit{t}=0 \end{aligned}\right. ,\;\;p,\;q\in [0,1] $ (15) Furthermore, the Jacobian matrix J of the dynamic game system is Eq. (16).
$ \begin{aligned} & J=\left(\begin{matrix} {{\dfrac{\partial {F}^{\mathrm{LVs}}(p,\textit{q})}{\partial p}}} & {{\dfrac{\partial {F}^{\mathrm{LVs}}(p,\textit{q})}{\partial q}}}\\ {{\dfrac{\partial {F}^{\mathrm{TVs}}(p,\textit{q})}{\partial p}}} &{{ \dfrac{\partial {F}^{\mathrm{TVs}}(p,\textit{q})}{\partial q}}} \end{matrix} \right)\\ &=\left(\begin{matrix} {{\left(1-2p\right)\left[\left(\Delta U_{1}^{\mathrm{LVs}}-\Delta U_{2}^{\mathrm{LVs}}\right)q+\Delta U_{2}^{\mathrm{LVs}}\right]}} & {{p\left(1-p\right)\left(\Delta U_{1}^{\mathrm{LVs}}-\Delta U_{2}^{\mathrm{LVs}}\right)}}\\ {{ q\left(1-q\right)\left(\Delta U_{1}^{\mathrm{TVs}}-\Delta U_{2}^{\mathrm{TVs}}\right)}} & {{\left(1-2q\right)\left[\left(\Delta U_{1}^{\mathrm{TVs}}-\Delta U_{2}^{\mathrm{TVs}}\right)p+\Delta U_{2}^{\mathrm{TVs}}\right]}} \end{matrix} \right) \end{aligned}$ (16) Stability of equilibrium points
-
Whether an equilibrium point is stable, saddle, center, or unstable depends on the determinant and trace of the Jacobian matrix. According to the Friedman method for determining the type of an equilibrium point, when the determinant of the Jacobian matrix is greater than 0, and the trace is less than 0, the equilibrium point is a stable point, and the strategy chosen by each decision-maker at this time is an evolutionary stable strategy. From the above analyses, it can be seen that the signs of the determinant and trace of the Jacobian matrix depend on the signs of
$ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{2}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ Table 2. Stability analyses of equilibrium points of evolutionary game.
Equilibrium points Situation 1 Situation 2 Situation 3 Situation 4 $ \Delta U_{1}^{\mathrm{LVs}} $>0, $ \Delta U_{2}^{\mathrm{LVs}} $<0 $ \Delta U_{1}^{\mathrm{LVs}} $>0, $ \Delta U_{2}^{\mathrm{LVs}} $<0 $ \Delta U_{1}^{\mathrm{LVs}} $<0, $ \Delta U_{2}^{\mathrm{LVs}} $<0 $ \Delta U_{1}^{\mathrm{LVs}} $<0, $ \Delta U_{2}^{\mathrm{LVs}} $<0 $ \Delta U_{1}^{\mathrm{TVs}} $>0, $ \Delta U_{2}^{\mathrm{TVs}} $>0 $ \Delta U_{1}^{\mathrm{TVs}} $>0, $ \Delta U_{2}^{\mathrm{TVs}} $<0 $ \Delta U_{1}^{\mathrm{TVs}} $>0, $ \Delta U_{2}^{\mathrm{TVs}} $>0 $ \Delta U_{1}^{\mathrm{TVs}} $>0, $ \Delta U_{2}^{\mathrm{TVs}} $<0 (0,0) Saddle point Stable point Saddle point Stable point (0,1) Saddle point Instability point Stable point Saddle point (1,0) Instability point Instability point Instability point Instability point (1,1) Stable point Stable point Saddle point Saddle point (x,y) — Central point — — Equilibrium points Situation 5 Situation 6 Situation 7 Situation 8 $ \Delta U_{1}^{\mathrm{LVs}} $>0, $ \Delta U_{2}^{\mathrm{LVs}} $<0 $ \Delta U_{1}^{\mathrm{LVs}} $>0, $ \Delta U_{2}^{\mathrm{LVs}} $<0 $ \Delta U_{1}^{\mathrm{LVs}} $<0, $ \Delta U_{2}^{\mathrm{LVs}} $<0 $ \Delta U_{1}^{\mathrm{LVs}} $<0, $ \Delta U_{2}^{\mathrm{LVs}} $<0 $ \Delta U_{1}^{\mathrm{TVs}} $<0, $ \Delta U_{2}^{\mathrm{TVs}} $>0 $ \Delta U_{1}^{\mathrm{TVs}} $<0, $ \Delta U_{2}^{\mathrm{TVs}} $<0 $ \Delta U_{1}^{\mathrm{TVs}} $<0, $ \Delta U_{2}^{\mathrm{TVs}} $>0 $ \Delta U_{1}^{\mathrm{TVs}} $<0, $ \Delta U_{2}^{\mathrm{TVs}} $<0 (0,0) Saddle point Stable point Saddle point Stable point (0,1) Saddle point Instability point Stable point Saddle point (1,0) Saddle point Saddle point Saddle point Saddle point (1,1) Saddle point Saddle point Instability point Instability point (x,y) Saddle point — — — Equilibrium points Situation 9 Situation 10 Situation 11 Situation 12 $ \Delta U_{1}^{\mathrm{LVs}} $>0, $ \Delta U_{2}^{\mathrm{LVs}} $>0 $ \Delta U_{1}^{\mathrm{LVs}} $>0, $ \Delta U_{2}^{\mathrm{LVs}} $>0 $ \Delta U_{1}^{\mathrm{LVs}} $<0, $ \Delta U_{2}^{\mathrm{LVs}} $>0 $ \Delta U_{1}^{\mathrm{LVs}} $<0, $ \Delta U_{2}^{\mathrm{LVs}} $>0 $ \Delta U_{1}^{\mathrm{TVs}} $>0, $ \Delta U_{2}^{\mathrm{TVs}} $>0 $ \Delta U_{1}^{\mathrm{TVs}} $>0, $ \Delta U_{2}^{\mathrm{TVs}} $<0 $ \Delta U_{1}^{\mathrm{TVs}} $>0, $ \Delta U_{2}^{\mathrm{TVs}} $>0 $ \Delta U_{1}^{\mathrm{TVs}} $>0, $ \Delta U_{2}^{\mathrm{TVs}} $<0 (0,0) Instability point Saddle point Instability point Saddle point (0,1) Saddle point Instability point Stable point Saddle point (1,0) Saddle point Saddle point Saddle point Saddle point (1,1) Stable point Stable point Saddle point Saddle point (x,y) — — — Saddle point Equilibrium points Situation 13 Situation 14 Situation 15 Situation 16 $ \Delta U_{1}^{\mathrm{LVs}} $>0, $ \Delta U_{2}^{\mathrm{LVs}} $>0 $ \Delta U_{1}^{\mathrm{LVs}} $>0, $ \Delta U_{2}^{\mathrm{LVs}} $>0 $ \Delta U_{1}^{\mathrm{LVs}} $<0, $ \Delta U_{2}^{\mathrm{LVs}} $>0 $ \Delta U_{1}^{\mathrm{LVs}} $<0, $ \Delta U_{2}^{\mathrm{LVs}} $>0 $ \Delta U_{1}^{\mathrm{TVs}} $<0, $ \Delta U_{2}^{\mathrm{TVs}} $>0 $ \Delta U_{1}^{\mathrm{TVs}} $<0, $ \Delta U_{2}^{\mathrm{TVs}} $<0 $ \Delta U_{1}^{\mathrm{TVs}} $<0, $ \Delta U_{2}^{\mathrm{TVs}} $>0 $ \Delta U_{1}^{\mathrm{TVs}} $<0, $ \Delta U_{2}^{\mathrm{TVs}} $<0 (0,0) Instability point Saddle point Instability point Saddle point (0,1) Saddle point Instability point Stable point Saddle point (1,0) Stable point Stable point Stable point Stable point (1,1) Saddle point Saddle point Instability point Instability point (x,y) — — Central point — LVs make behavioral decisions according to the strategies corresponding to the evolutionary game results. Firstly, each decision-maker identifies the evolutionary stable strategy. Then, the decision-maker judges whether the currently selected strategy is an evolutionary stable strategy based on the current running state: if the strategy is stable, the decision-maker maintains the currently selected strategy; otherwise, the decision-maker selects the evolutionary stable strategy. If there are multiple evolutionary stable strategies, the decision-maker chooses the evolutionary stable strategy with the highest total utility.
-
A DJI Mavic 2 Zoom Unmanned Aerial Vehicle is selected to photograph traffic flow in the urban expressway merging area to record the entry and exit, the vehicle trajectories, and road traffic environment information. The mainline of the urban expressway is a two-way six-lane road; the vehicles on the current lane (ramp) are LVs, and the rightmost lane of the mainline is the target lane. Lane-changing of LVs needs to be completed in this case. The tracker software is used to extract the data from the videos to obtain the speed, acceleration, and position coordinates of each vehicle, and store them in the form of a database.
Data processing
-
To conduct an analysis of the characteristics of lane-changing vehicles and target vehicles during lane-changing, it is first necessary to screen out vehicle pairs with an interactive relationship. Subsequently, the movement trajectories of the target vehicles are extracted when each lane-changing vehicle is in the process of lane-changing. The screening process mainly relies on 2 core rules, which are based on vehicle types and interactions, and the lane-changing samples that meet these rules will be identified as having exhibited interactive behaviors.
Screening based on vehicle types
-
The vehicle types collected in the dataset are categorized into cars, medium-sized vehicles, and buses. The impacts of the same lane-changing maneuvers vary significantly across different vehicle types. To ensure the consistency and comparability of the research results, this study restricts the analysis scope to cars, which account for a relatively high proportion of the data. Only the lane-changing behaviors of cars are investigated, and during data screening, only the relevant data involving cars as interacting vehicles are retained.
Screening based on vehicle interactions
-
This study examines the game between LVs and TVs. In addition to the data from vehicles performing lane-changing, it is also necessary to screen the trajectory data of TVs that interact with LVs in accordance with specific criteria.
When LVs do not occupy the target lane, and TVs reach the conflict zone, a game occurs between LVs and TVs. The specific judgment rules are as below.
$ {y}_{\mathrm{LVs}} \lt {y}_{c} $ (17) $ d \lt 3{v}_{\mathrm{T}}(t) $ (18) where, yLVs is the longitudinal coordinate of LVs; and yc is the longitudinal coordinate of the center line of the target lane.
In summary, a total of 500 sets of trajectory data for vehicle lane-changing were obtained. The utilities of LVs and TVs according to Eqs (1)−(7) were calculated with the obtained data and statistical results of different types of utilities, as shown in Fig. 4. In the figure, (L1,T1) means (lane-changing, giving-way), (L1,T2) means (lane-changing, not-giving-way), (L2,T1) means (not-lane-changing, giving-way), and (L2,T2) means (not-lane-changing, not-giving-way).
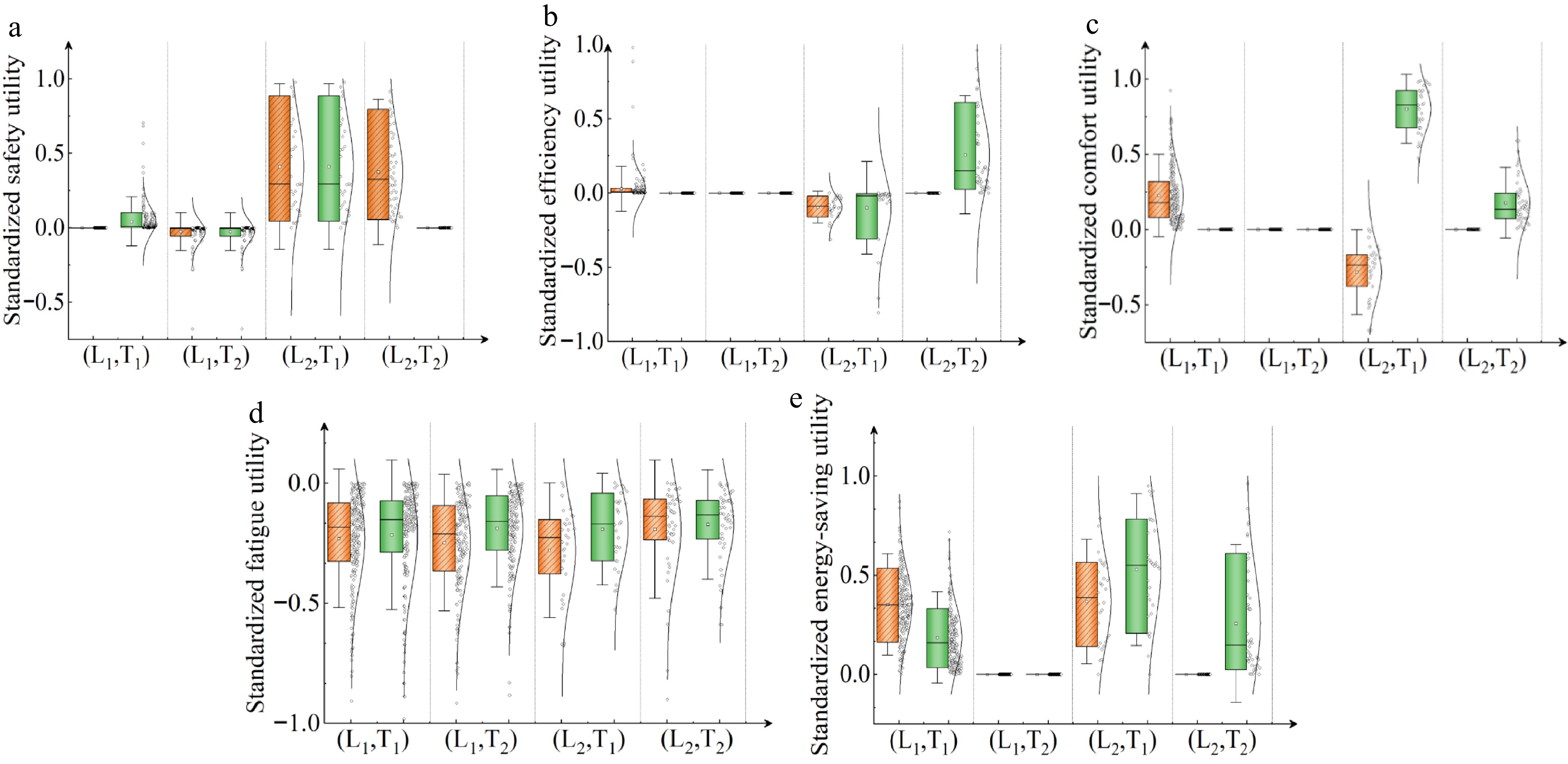
Figure 4.
Standardized safety, efficiency, comfort, fatigue, and energy-saving utilities.
The utility matrix obtained from decision-makers is then calculated through various standardized utilities. Finally, it is shown there are five equilibrium points in the game between LVs and TVs in each scenario. The four equilibrium points (0,0), (0,1), (1,0) and (1,1) are the same for the four scenarios, while the remaining one equilibrium point is (0.8694,0.5854), (0.7163,0.5854), (0.8694,0.8788), and (0.7163,0.8788) respectively. According to the stability analysis of the equilibrium points, such a situatiion conforms to Situation 2 in Table 2. Thus, the stability point of the evolutionary game system is (0,0) or (1,1).
Results
-
LVs make decisions according to the strategies corresponding to the evolutionary game results. The running states of the screened vehicles conforms to
$ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{2}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ Figure 5 shows the evolutionary paths of vehicle lane-changing corresponding to Scenarios 1, 2, 3 and 4. In Fig. 5, the evolutionary paths obviously show different characteristics. When p and q are small, the evolutionary game system is in an unstable state, with p and q changing significantly. LVs and TVs are constantly trying and adjusting their strategies. In the evolutionary process, the proportion of the lane-changing strategy or that of the giving-way strategy will gradually decrease, and the evolutionary results slowly converge to the strategy profile (not-lane-changing, not-giving-way). When p and q are large, the proportion of the lane-changing strategy or that of the giving-way strategy will gradually increase, and the evolutionary results quickly converge to the strategy profile (lane-changing, giving-way).
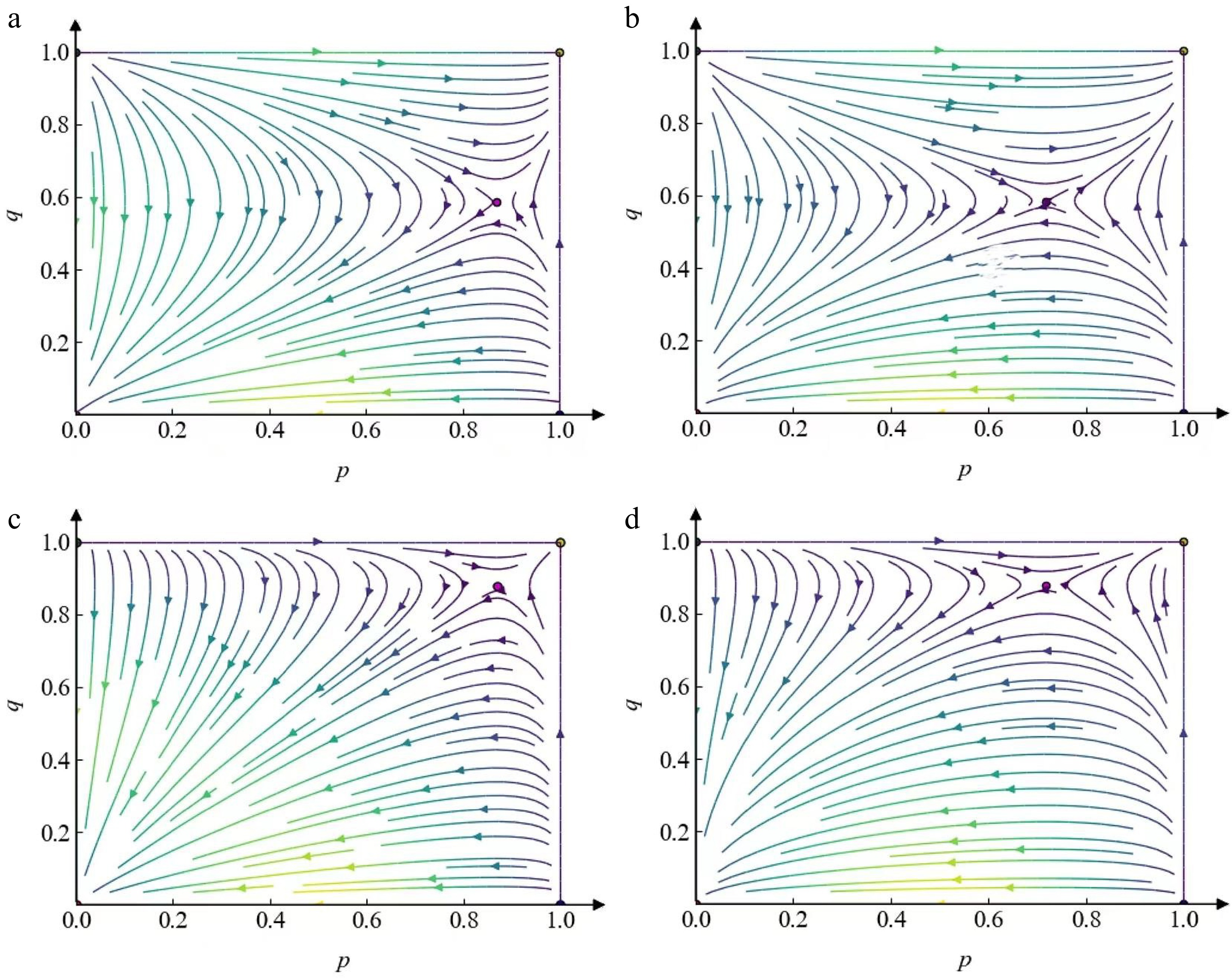
Figure 5.
Evolutionary paths of lane-changing vehicles. (a) HLVs-HTVs game. (b) HLVs-ATVs game. (c) ALVs-HTVs game. (d) ALVs-ATVs game.
There are significant differences in game characteristics among different scenarios. In Scenario 1, both decision-makers are human-driven vehicles. Due to drivers' uncertainty and flexibility, drivers frequently adjust their strategies so that more evolutionary paths emerge. In contrast, in Scenario 4, both decision-makers are autonomous vehicles that operate strictly in accordance with the predetermined rules. Consequently, their behavioral patterns are highly fixed and predictable, featuring a stable interaction process, which suppresses to frequently adjust their strategies. Also, the evolutionary game results under Scenarios 2 and 3 are between that under Scenario 1 and that under Scenario 4, since involving both drivers and autonomous vehicles.
These differences in game performance stem from the fundamental disparities of different decision-makers and strategy profiles. The subjectivity of human driving is the key factor causing strategic fluctuations. Drivers' judgments rely on variable factors such as their experiences and psychological states, so that their perception of road conditions and the other party's intentions is easily interfered, which in turn leads to frequently change their strategies. In contrast, the consistency of autonomous driving directly enhances the stability of autonomous vehicles via fixed decision-making logic. Such a logic can transmit decision intentions and state parameters in real time and without bias. The interaction between autonomous vehicles is accurate and complete.
-
When the initial proportions make the game decision-makers prone to conflict, the evolutionary strategies will be more conducive to ensuring driving safety. In the following analysis, p and q are taken as different initial values, and the evolutionary paths of the four scenarios with time are obtained, as shown in Fig. 6. In Fig. 6, the proportion of the lane-changing strategy and that of the giving-way strategy tend to be stable with time under different scenarios and initial values. The combination of high p and low q or that of low p and high q accelerates the evolutionary convergence because of the strong conflict resulted from the initial strategies. For example, in HLVs-HTVs game, the curves with p = 0.8 and q = 0.2 approach the steady state (0,0) earlier than those with p = 0.6 and q = 0.4. This is because the conflict in the game resulted from the initial strategies is large. As a result, the strategy adjustment is more urgent so that the time to achieve stability is shortened. When p and q approach the middle values, the convergence will be delayed, the strategy adjustment will be smoother, and the evolutionary game system will take longer time to reach stability.
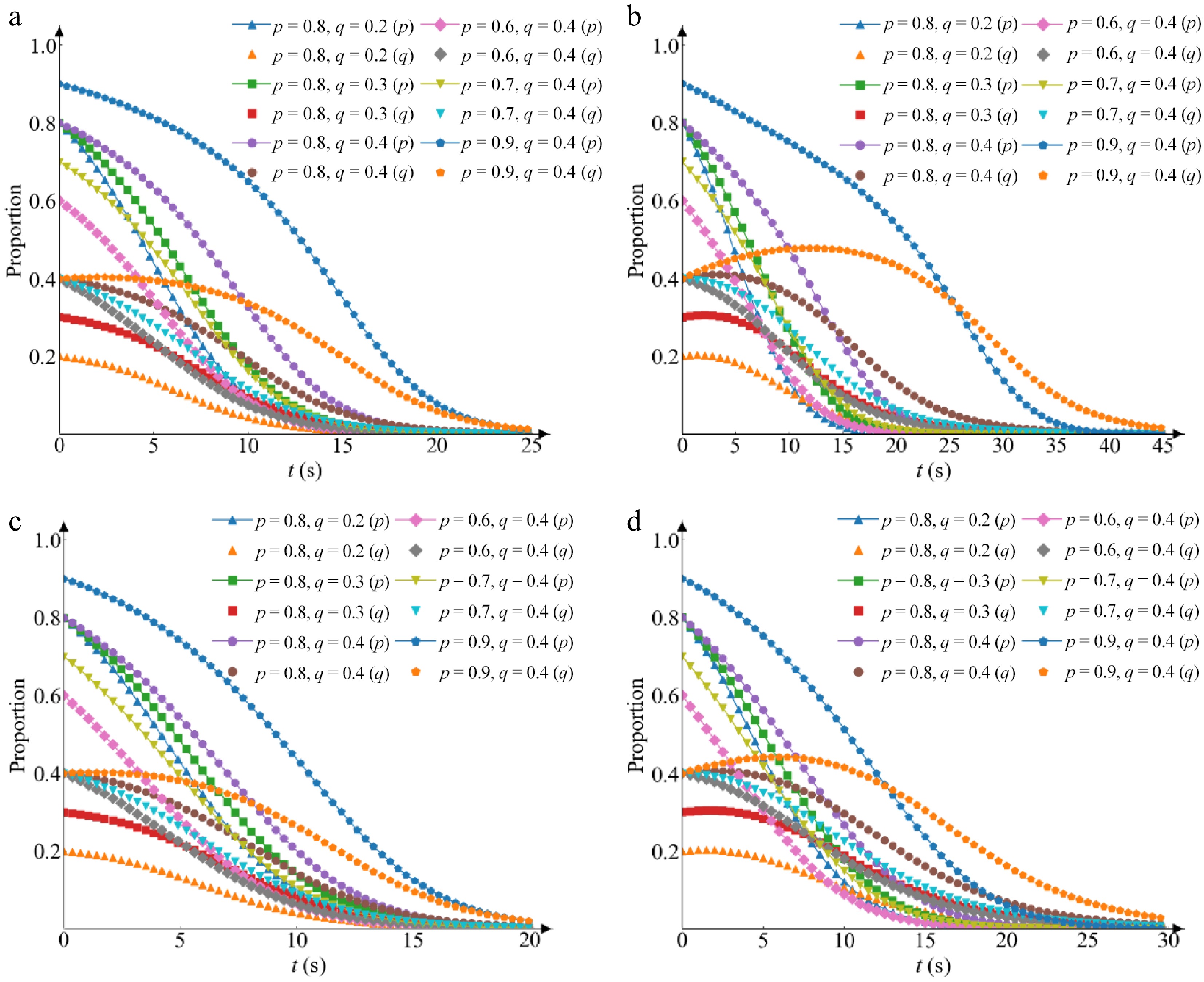
Figure 6.
Evolutionary paths of decision-makers with different p and q. (a) HLVs-HTVs game. (b) HLVs-ATVs game. (c) ALVs-HTVs game. (d) ALVs-ATVs game.
The evolution of the game system under the four scenarios is different. In HLVs-HTVs game, the curves of different combinations of p and q are obviously dispersive, and the proportions of lane-changing and giving-way fluctuate significantly. In HLVs-ATVs game, the evolution converges more slowly, the curve trendency of lane-changing is more obviously different from that of giving-way. In ALVs-HTVs game, the evolution converges more quickly, the curves of lane-changing and giving-way are all smoother. In ALVs-ATVs game, the curves of different combinations of p and q are obviously centralized, and the curves of lane-changing are smoother. Overall, the evolutionary stability of ALVs-ATVs game is stronger, and the curve trendency of lane-changing is more obviously similar to that of giving-way.
Sensitivity of $ {\bf{\Delta}} \boldsymbol{U}_{\boldsymbol{i}}^{\mathbf{LVs}} $
-
When
$ \Delta U_{i}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{2}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{LVs}} $ 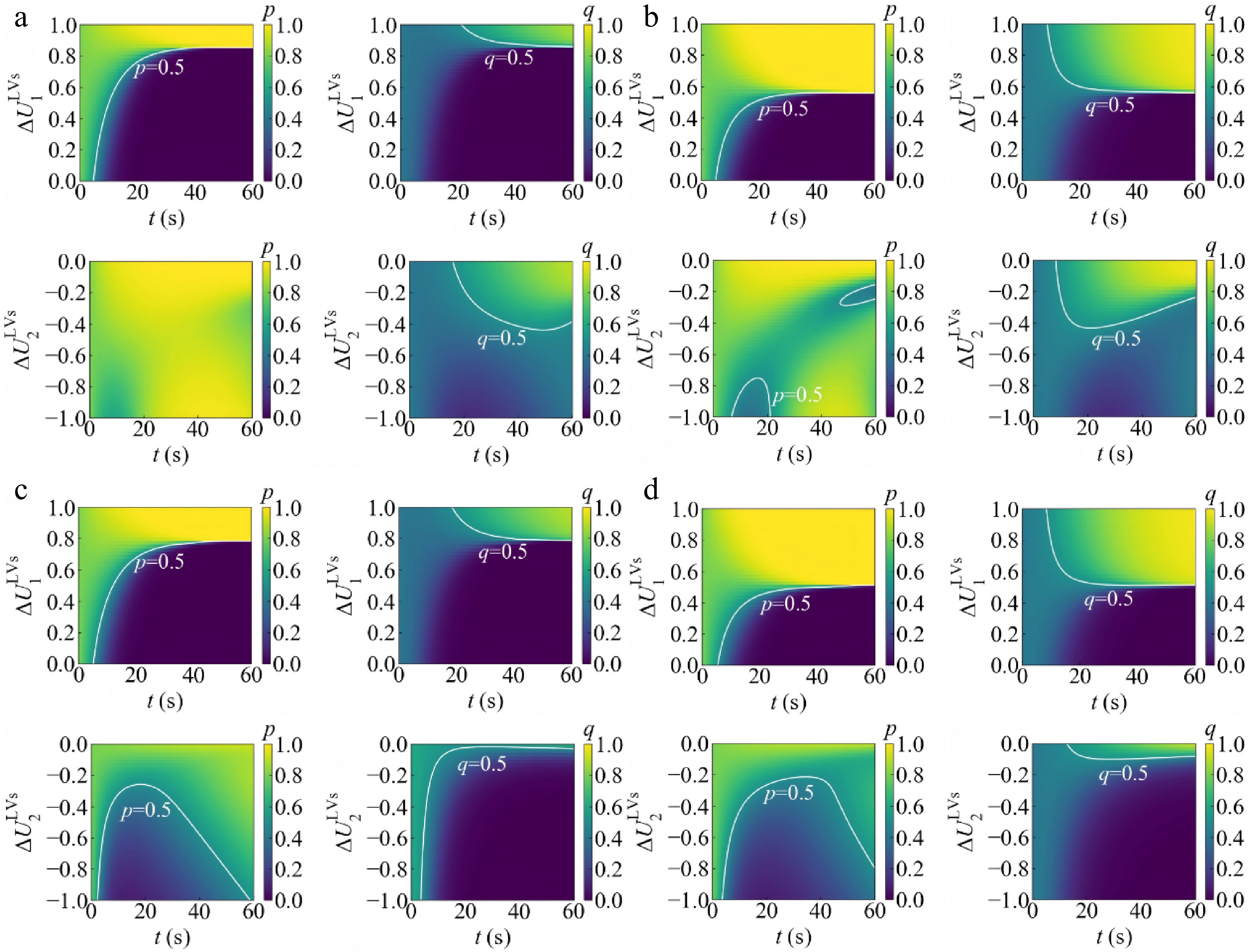
Figure 7.
Evolutionary convergence of the proportion of the strategy under different $ \Delta U_{i}^{\mathrm{LVs}} $. (a) HLVs-HTVs game. (b) HLVs-ATVs game. (c) ALVs-HTVs game. (d) ALVs-ATVs game.
As shown in Fig. 7, under different game scenarios,
$ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_1^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_1^{\mathrm{LVs}} $ Similarly,
$ \Delta U_{2}^{\mathrm{LVs}} $ $ \Delta U_2^{\mathrm{LVs}} $ $ \Delta U_{2}^{\mathrm{LVs}} $ $ \Delta U_{2}^{\mathrm{LVs}} $ $ \Delta U_{2}^{\mathrm{LVs}} $ $ \Delta U_2^{\mathrm{LVs}} $ $ \Delta U_2^{\mathrm{LVs}} $ $ \Delta U_{2}^{\mathrm{LVs}} $ $ \Delta U_{2}^{\mathrm{LVs}} $ Sensitivity of $ {\boldsymbol{\Delta}} {\boldsymbol{U}}_{{\boldsymbol{j}}}^{\mathbf{TVs}} $
-
When
$ \Delta U_j^{\mathrm{TVs}} $ $ \Delta U_1^{\mathrm{TVs}} $ $ \Delta U_2^{\mathrm{TVs}} $ $ \Delta U_{1}^{\mathrm{TVs}} $ $ \Delta U_{1}^{\mathrm{TVs}} $ $ \Delta U_{1}^{\mathrm{TVs}} $ $ \Delta U_{1}^{\mathrm{TVs}} $ $ \Delta U_{1}^{\mathrm{TVs}} $ $ \Delta U_1^{\mathrm{TVs}} $ 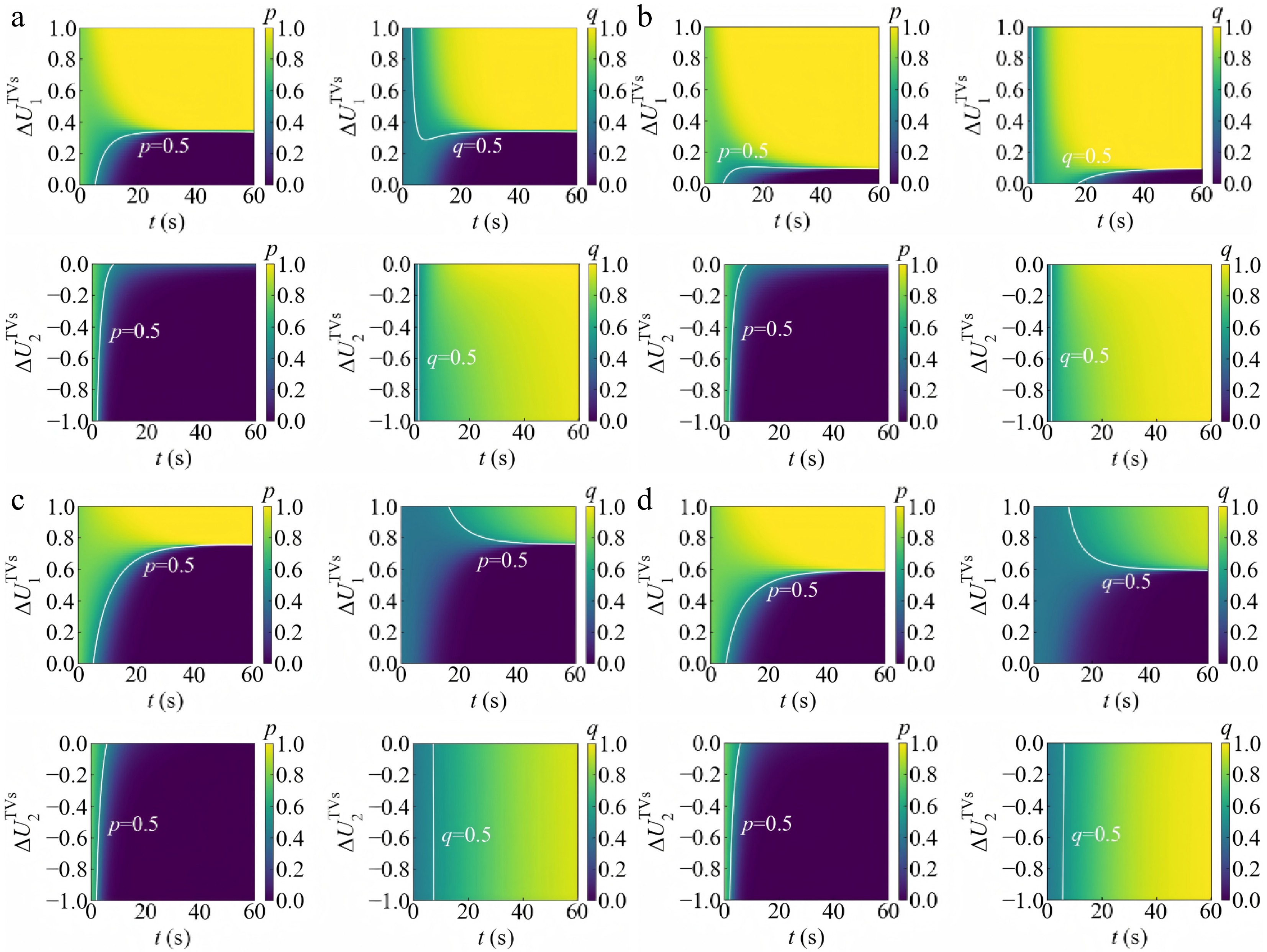
Figure 8.
Evolutionary convergence of the proportion of the strategy under different $ \Delta U_{j}^{\mathrm{TVs}} $. (a) HLVs-HTVs game. (b) HLVs-ATVs game. (c) ALVs-HTVs game. (d) ALVs-ATVs game.
The smaller
$ \Delta U_{2}^{\mathrm{TVs}} $ $ \Delta U_2^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ $ \Delta U_2^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ To sum up, when involving human driving, the strategic proportions are sensitive to
$ \Delta U_{1}^{\mathrm{LVs}} $ $ \Delta U_{2}^{\mathrm{LVs}} $ $ \Delta U_{1}^{\mathrm{TVs}} $ $ \Delta U_{2}^{\mathrm{TVs}} $ $ \Delta U_1^{\mathrm{LVs}},\ \Delta U_2^{\mathrm{LVs}},\ \Delta U_1^{\mathrm{TVs}} $ $ \Delta U_2^{\mathrm{TVs}} $ -
This study focuses on the decision-making problem of lane-changing vehicles in the environment of human-machine co-driving. An evolutionary game model with multiple utilities was constructed to analyze the evolutionary mechanism of a dynamic game system, and the following conclusions are drawn:
(1) Based on the stability analysis of equilibrium points, there are a total of six stable strategy profiles in the dynamic game system, including (not-lane-changing, not-giving-way), (not-lane-changing, giving-way), (lane-changing, not-giving-way), (lane-changing, giving-way), (not-lane-changing, not-giving-way) and (lane-changing, giving-way), (not-lane-changing, giving-way) and (lane-changing, not-giving-way). Among them, the (lane-changing, not-giving-way) strategy profile, which may pose a collision risk, only exists briefly under specific conditions and will not become a long-term stable point. In practical decision-making, vehicles tend to prefer a strategy that balances safety and efficiency.
(2) The evolutionary characteristics of different game scenarios are significantly different. Because of the flexibility and uncertainty of drivers' decision-making, the strategies in HLVs-HTVs game are frequently adjusted, and the evolutionary paths are diverse. The evolutionary path in ALVs-ATVs game is the most stable and is less affected by the initial strategies because of the fixed and predictable behaviors of autonomous vehicles. The characteristics in HLVs-ATVs and ALVs-HTVs games falls between those in HLVs-HTVs and ALVs-ATVs games.
(3) Sensitivity analyses show that a strong conflict resulted from initial strategies (e.g., high lane-changing proportion, low giving-way proportion) accelerates evolutionary convergence. Among the utility parameters, the adjustment to the safety utility and that to the efficiency utility have significant impacts on the direction of strategy evolution. The energy-saving utility can promote the formation of the (lane-changing, giving-way) strategy profile, while the fatigue utility inhibits the frequent lane-changing behaviors of human-driven vehicles.
(4) By recalibrating the parameters related to the selected utilities, the formulated model in this study can be applied to freeways, highways and urban streets. The evolutionary stable stategies derived from the formulated model in this study can provide decision-making support for autonomous vehicles.
(5) In the future, the formulated model will be improved so as to describe the principles of multi-vehicle interaction and enhance the adaptability of the formulated model to complicated and real traffic environments.
This work was supported by the National Natural Science Foundation of China (52172314); the Natural Science Foundation of Shandong Province, China (ZR2024MG021 and ZR2024QG023); and the Special Funding Project of Taishan Scholar Engineering.
-
The authors confirm their contributions to the paper as follows: conceptualization, methodology: Yao R, Wang X; resources: Yao R, Sun F; validation: Yao R, Chen Y; investigation: Wang X, Yang B; data curation: Wang X, Yang B; formal analysis: Sun F; visualization: Zhang H; software, writing − original draft: Wang X; writing − review & editing: Yao R, Wang X, Chen Y, Sun F, Zhang H; project administration and supervision: Yao R. All authors reviewed the results and approved the final version of the manuscript.
-
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
-
The authors declare that they have no conflict of interest.
- Copyright: © 2026 by the author(s). Published by Maximum Academic Press, Fayetteville, GA. This article is an open access article distributed under Creative Commons Attribution License (CC BY 4.0), visit https://creativecommons.org/licenses/by/4.0/.
-
About this article
Cite this article
Yao R, Wang X, Yang B, Chen Y, Sun F, et al. 2026. Modeling of lane-changing behaviors of human-machine co-driving vehicles based on evolutionary game. Digital Transportation and Safety 5(1): 10−21 doi: 10.48130/dts-0026-0001 

Modeling of lane-changing behaviors of human-machine co-driving vehicles based on evolutionary game
- Received: 01 October 2025
- Revised: 25 December 2025
- Accepted: 12 January 2026
- Published online: 31 March 2026
Abstract: To alleviate the conflicts resulting from lane-changing in human-machine co-driving, this study investigates four game scenarios: human-driven lane-changing vehicles (HLVs) and human-driven target vehicles (HTVs), HLVs and Autonomous target vehicles (ATVs), autonomous lane-changing vehicles (ALVs) and HTVs, and ALVs and ATVs. An evolutionary game model is formulated by integrating safety, efficiency, comfort, fatigue, and energy-saving utilities. The strategy selection process of decision-makers is simulated by replicator dynamics equations. Based on the Friedman method, the stability of equilibrium points in different situations is analyzed, and the sensitivity of evolutionary results to utility parameters is clarified. Results show that the strategy profile of (lane-changing, not-giving-way) that causes conflicts only exists temporarily under certain conditions and will not become a long-term stable point. The game characteristics under different scenarios are obviously different; that is, the game evolutionary paths for autonomous vehicles are the most stable, while the adjustment of game strategies for human-driven vehicles is more frequent. Additionally, energy-saving promotes the formation of the strategy profile of (lane-changing, giving-way), while fatigue limits the frequent lane-changing of human-driven vehicles. The evolutionary game model proposed can provide theoretical support for improving the performance of the human-machine co-driving system.
-
Key words:
- Human-machine co-driving /
- Autonomous driving /
- Lane-changing /
- Evolutionary game