








-
In recent decades, autonomous driving technology has progressed significantly and is gradually reshaping mobility models[1]. In general, autonomous driving involves electronic devices or robots performing sensing, decision-making, and various operational functions during the driving process in place of a human driver[2]. Based on the vehicle automation level, the Society of Automotive Engineers has suggested generally recognized categorization standards: no driving automation, driver assistance, partial driving automation, conditional driving automation, high driving automation, and full driving automation[3]. Herein, the term 'autonomous' refers to a vehicle with full driving automation. Other studies pertaining to partially autonomous vehicles are beyond the scope of this analysis.
Common application areas of autonomous driving technologies include passenger cars, commercial trucks, buses, etc. In particular, autonomous buses are essential for improving the quality of public transportation services. By eliminating the necessity for human drivers, autonomous buses can significantly lower operational costs, while providing more flexible and convenient pick-up and drop-off services. Based on the quantification of vehicle, labor, operating, and time costs in Japan, Abe[4] predicted that employing an autonomous bus service would reduce travel costs by 6%–11%. In addition, the widespread benefits of autonomous driving technology include increased mobility, improvements in travel time and traffic safety, increased operational efficiency, and reduced adverse environmental effects[5].
Owing to their numerous advantages, autonomous buses have been adopted in multiple countries and regions worldwide. With assistance from the European Union's Citymobil2 project, more than a dozen member states have successfully demonstrated the viability of autonomous buses on low-speed urban roads with mixed traffic environments, including France, Germany, Italy, Greece, Switzerland, Spain, Belgium, Finland, etc.[6]. Survey results regarding the pilot deployment of the CityMobil2 project in Greece indicated that residents favored the utilization of autonomous bus services[7]. In Spain, a face-to-face survey of passengers who have experienced autonomous bus services revealed that income, gender, and application scenarios can substantially affect traveler satisfaction and acceptance[8]. A field study involving 942 German passengers found that autonomous bus service safety and environmental friendliness were significant and that passengers who had traveled via autonomous buses showed a higher acceptance rate[9]. In Sweden, a longitudinal panel survey of three separate periods revealed that the variables affecting passenger usage changed dynamically over time. Service performance, such as comfort, frequency, and travel time, is a crucial aspect that affects passenger acceptance of autonomous buses. Following the implementation of the autonomous bus service in China, a survey of 576 ride-experienced passengers revealed that in-vehicle safety, service quality, and bus riding habits positively affected travelers' willingness to continue using the service[10]. Pilot application studies pertaining to autonomous bus services in the United States demonstrated their usefulness in increasing economic growth and commercial activity in cities, particularly in older and declining neighborhoods[11]. Moreover, the application of autonomous bus services in Singapore demonstrated that they can provide passengers with more efficient services and significantly reduce travel costs[12].
However, after evaluating multiple real-world scenarios of autonomous bus deployment and operation, several researchers indicated that several significant challenges still need to be overcome before they can be more widely adopted. In Finland, an empirical study revealed that passengers, particularly female passengers, perceived much worse in-vehicle security in autonomous buses than in traditional buses[13]. Similarly, a study of 1,419 respondents in Norway revealed that more than 70% of the sample indicated negative sentiments regarding the implementation of autonomous bus services owing to safety issues[14]. Approximately one half of respondents in the United States were hesitant to ride autonomous buses owing to safety concerns and distrust toward driverless technology[15].
The autonomous bus industry is still in the early stages of development; however, its promising future has garnered the considerable attention of academics. The deployment and operational optimization of autonomous bus services is a challenging endeavor affected by several parties, including the government, academics, industry, and passengers. Hence, the topics discussed and the methodologies used previously vary significantly, which might yield inconsistent results. Hence, to provide researchers with a complete understanding of the research progress and trends in the area, we conduct a comprehensive literature review to investigate the themes of interest, research techniques, and theoretical achievements related to autonomous bus services, which would benefit scholars investigating this topic.
The remainder of this paper is organized as follows: the next section presents the literature data sources, search strategies, selection criteria, an overview, and bibliometric analysis tools. Subsequently, we present a bibliometric analysis using VOSviewer, which includes literature authors, co-authorship countries, source journals, and keyword co-occurrence. In the following sections, we systematically review the current research and propose future recommendations for users' attitudes and operations, respectively. Finally, the main contributions, findings, and limitations of this study are summarized.
-
The Web of Science (WoS) is a comprehensive platform comprising several literature databases and is one of the most essential research tools for academic studies. As the oldest publishing and citation resource platform, it provides access to billions of cited references across various disciplines. The platform also exhibits leading search and analysis features that enable researchers to obtain adequate citation data for bibliometric analyses. Therefore, based on the WoS, we established a search strategy and selection criteria for the citation literature data utilized in this study to investigate the relationships among various research topics pertaining to autonomous buses. Figure 1 shows a flowchart of the literature review process.
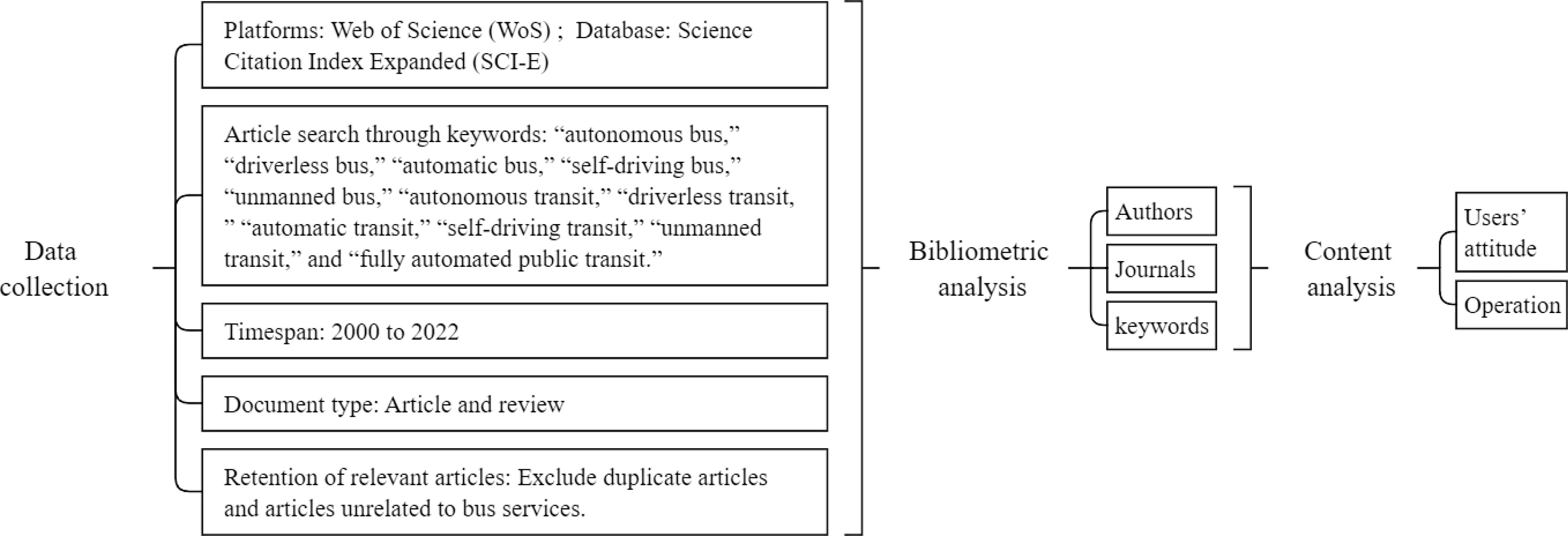
Figure 1.
Flowchart of the literature review.
Based on the current literature, the concept of autonomous buses varies based on the objectives and scenarios of a study. Therefore, based on a search conducted in the WoS, several concepts were set as keywords to acquire sufficient bibliographic records, including 'autonomous bus', 'driverless bus', 'automatic bus', 'self-driving bus', 'unmanned bus', 'autonomous transit', 'driverless transit', 'automatic transit', 'self-driving transit', 'unmanned transit', and 'fully automated public transit'. A bibliographic data search was performed in January 2023, and all related journal articles published before 2023 were obtained. This was performed to meticulously investigate the evolutionary trends of origin, progress, and present accomplishments in the field. Based on these search criteria, we acquired 300 bibliographic references from the WoS core collection dataset, as shown in Fig. 2.
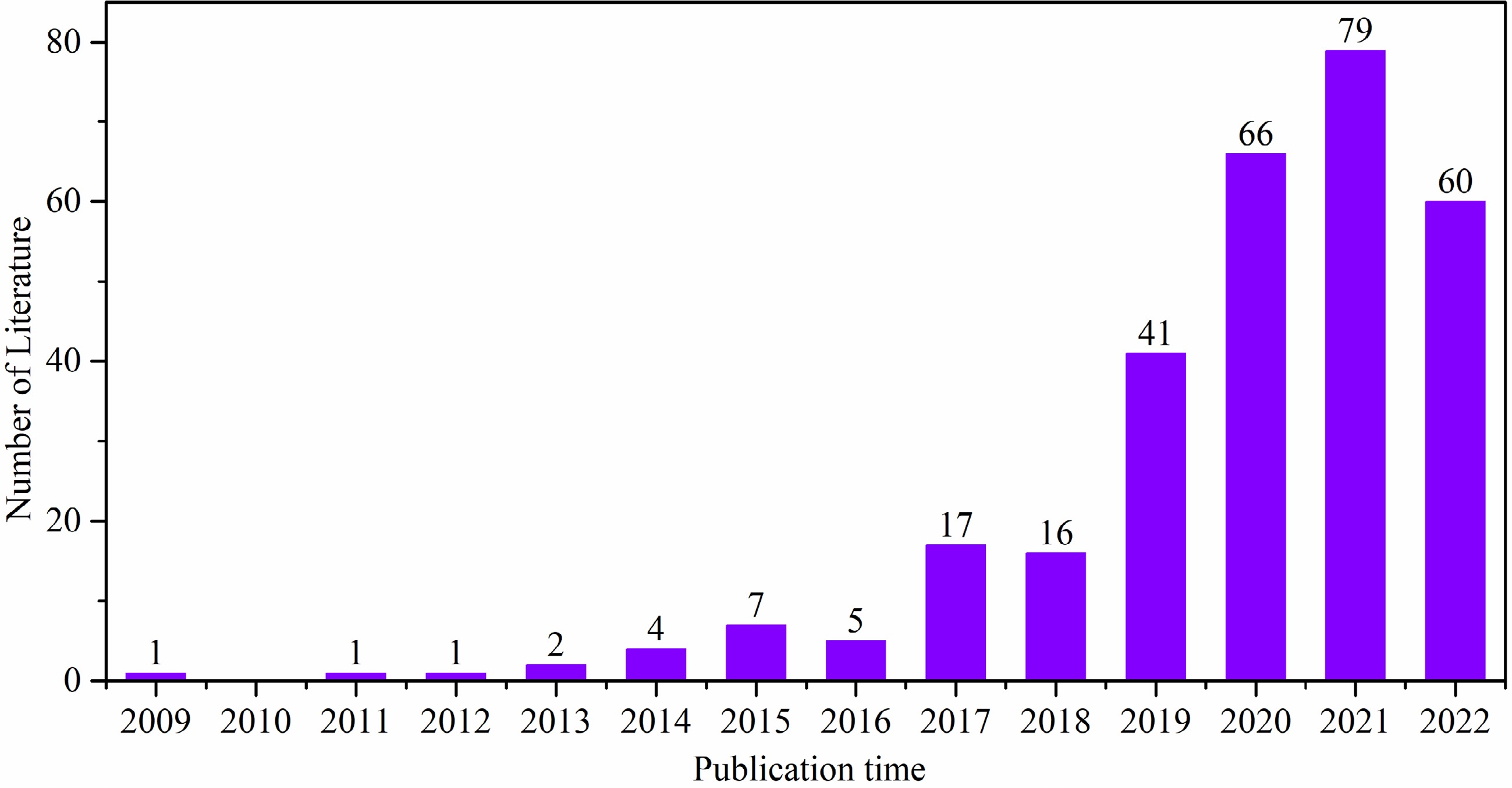
Figure 2.
Overview of obtained bibliographic reference data.
As shown in Fig. 2, the earliest research results related to autonomous buses were those obtained in 2009. Benmimoun et al.[16] presented a demonstration application for autonomous bus services in Spain as part of the CityMobil project. The project includes various demonstration activities by applying innovative and advanced mobility solutions in Europe to evaluate their efficacy in enhancing travel mobility and resolving urban traffic issues. Subsequently, a small group of academics began to investigate the challenges in this field. In 2014, as information and automation technology improved, it re-emerged as an intriguing subject, and a considerable body of literature was published. This may be because 2014 was the year in which the revolutionary CityMobil2 project was demonstrated in Italy. Notably, the number of publications in 2022 was significantly lower than in 2021, decreasing by about 25%. Considering the ongoing enthusiasm around autonomous driving research, the plausible explanation for this decline may be the delays in incorporating publications into databases.
The bibliographic references obtained were imported into VOSviewer for bibliometric analysis. Currently, this program is regarded as one of the most used tools for visualizing and analyzing bibliometric data[17]. Using a visual network layout and effective clustering algorithms, the program can intuitively demonstrate various relationships in the literature, e.g., co-authorship, co-citation, bibliographic coupling, keyword co-occurrence, etc. Additional details regarding the bibliometric analysis algorithms employed in VOSviewer and their superiority over other typically used software programs are provided by van Eck & Waltman[18].
-
The database of authors used for the analysis comprised 842 authors from the 300 papers obtained. To analyze the authors, we set the minimum numbers of publications and citations per author to two and one, respectively. These thresholds were established such that the analysis findings of VOSviewer would be straightforward and simple to comprehend. A total of 123 among the 842 authors satisfied the thresholds, and an analysis of the findings regarding the relationships among these scholars is shown in Fig. 3.
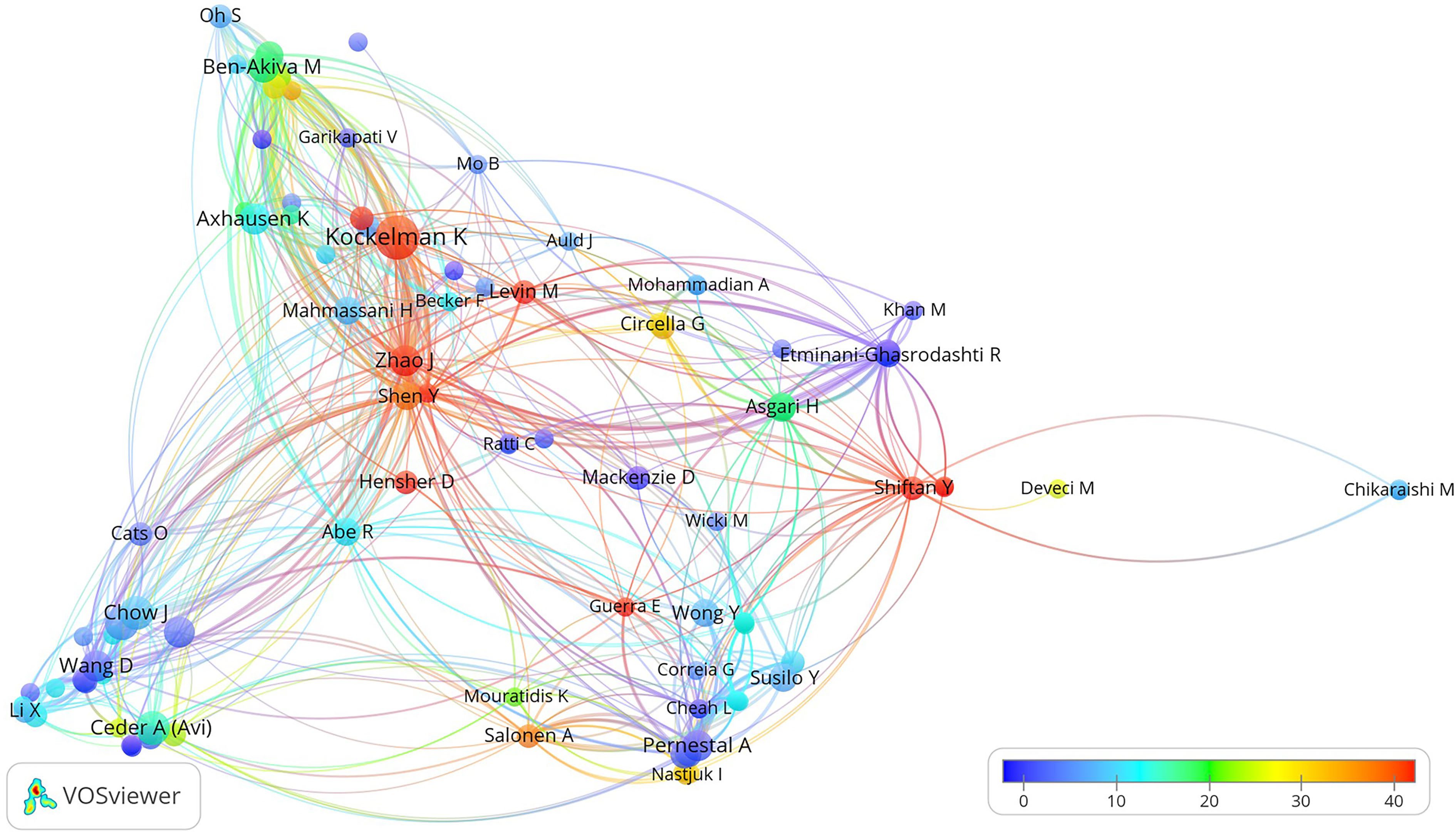
Figure 3.
Relationship among various authors.
In Fig. 3, the size of the nodes shows the number of papers published by the authors, the color of the nodes indicates the number of citations of each document, and the distance between the nodes indicates the relevance of the scholar to others. Among these authors, the top-10 authors were listed based on the total number of documents and their number of citations, as shown in Table 1.
Table 1. Top-10 authors ranked by total documents and citations.
Rank Author Documents Author Citations 1 Kockelman K. 10 Shiftan Y. 416 2 Ceder A. (Avi) 6 Kockelman K. 389 3 Chow J. 6 Hensher A. 247 4 Jenelius E. 6 Zhao J. 225 5 Axhausen K. 5 Guerra E. 219 6 Ben-Akiva M. 5 Shen Y. 146 7 Pernestal A. 5 Zhang H. 139 8 Rau A. 5 Levin M. 136 9 Wang Z. 5 Acheampong R. 130 10 Zhao J. 5 Cugurullo F. 130 As shown in Table 1, Kockelman, a scholar from the University of Texas at Austin, has published 10 papers and is the author with the most publications. The three subsequent scholars published six papers each, i.e., Ceder A. (Avi) from the University of Auckland, Chow J. from New York University, and Jenelius E. from the KTH Royal Institute of Technology. Despite authoring four documents, Shiftan Y. from the Israel Institute of Technology ranked first with 416 citations. Professor Zhao J. from MIT and his associates Shen Y. and Zhang H. et al. contributed significantly to the field of autonomous bus services, with an average of over 40 citations per paper. In addition, as shown in Fig. 3, we discovered co-authorship relationships among 20 scholars.
Analysis of source journals
-
Statistics regarding the origins of the papers showed that 80 journals published articles pertaining to autonomous bus services. Among them, 34 journals published at least two documents and were cited at least once; their connections are shown in Fig. 4. The size of the nodes in the figure shows the number of times each journal was cited, and the color of the nodes shows the average year in which the papers were published by the journal. Moreover, the lines between the nodes indicate mutual citations between journals, where the smaller the distance between two nodes, the higher the number of mutual citations.
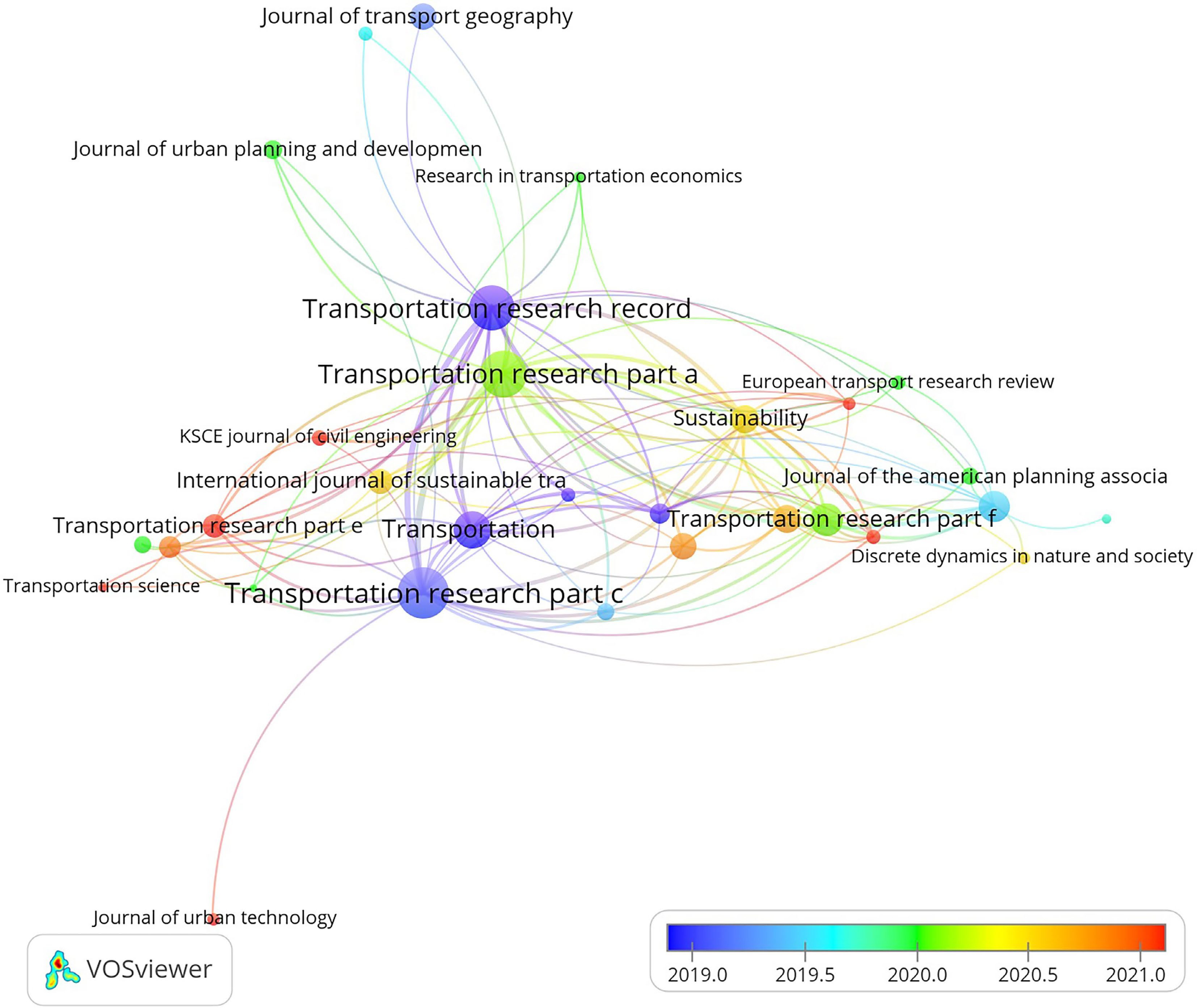
Figure 4.
Connection among various source journals.
As shown in Fig. 4, these journals are early sources of outcomes regarding autonomous bus services, e.g., Transportation Research Record, Transportation Research Part C, and Transportation. Therefore, these journals indicate a significant number of articles and citations. As shown in Table 2, Transportation Research Record, Transportation Research Part A, and Transportation Research Part C were the top-three journals, with 41, 32, and 30 papers, respectively. Moreover, the high cross-citations between Transportation Research Record and Transportation Research Part A, as well as between Transportation and Transportation Research Part A, indicate that these journals reported highly relevant outcomes. Transportation is the journal that published early outcomes in the field, although the total number of papers was not high. Notably, although only five papers were published in Transportation, the total number of citations was 338, thus rendering it the journal with the highest average citations per document. In addition, the most recent research outcomes in this field were published in Transportation Research Part E, Transportation Science, and the KSCE Journal of Civil Engineering. The scope of these journals and the increase in the number of papers published show that research pertaining to autonomous bus services has progressed from the initial stages of acceptability, feasibility, planning, and design to the more complex aspects of service optimization.
Table 2. Top-10 journals ranked by total documents and average citations.
Rank Journal Documents Journal Citations 1 Transportation Research Record 41 Transportation 67.6 2 Transportation Research Part A 32 Journal of Transport Geography 31.0 3 Transportation Research Part C 30 Transportation Research Part C 29.4 4 Sustainability 21 Transportation Research Part A 22.2 5 Journal of Advanced Transportation 12 Transportation Research Part F 21.4 6 Transportation Research Part F 10 Transport Policy 20.9 7 Transport Policy 10 Journal of Urban Planning and Development 20.0 8 Transportation Research Part D-Transport and Environment 9 International Journal of Sustainable Transportation 18.8 9 Cities 8 Transportation Research Record 15.8 10 Research in Transportation Business and Management 7 Transportation Research Part D 14.8 Analysis of keyword co-occurrence
-
Co-occurrence analysis of keywords is a method to determine the relevance of keywords to each other by observing the frequency of their simultaneous appearance. A total of 1,480 keywords from the 300 documents were analyzed in this study, among which 87 appeared more than five times simultaneously. These 87 keywords formed a network (Fig. 5) that showed the simultaneous appearance of each keyword and how they were related. The size of the nodes in the figure indicates the number of times a keyword appears, and the same-colored nodes indicate that these keywords exhibit high relevance and can be classified into a cluster.
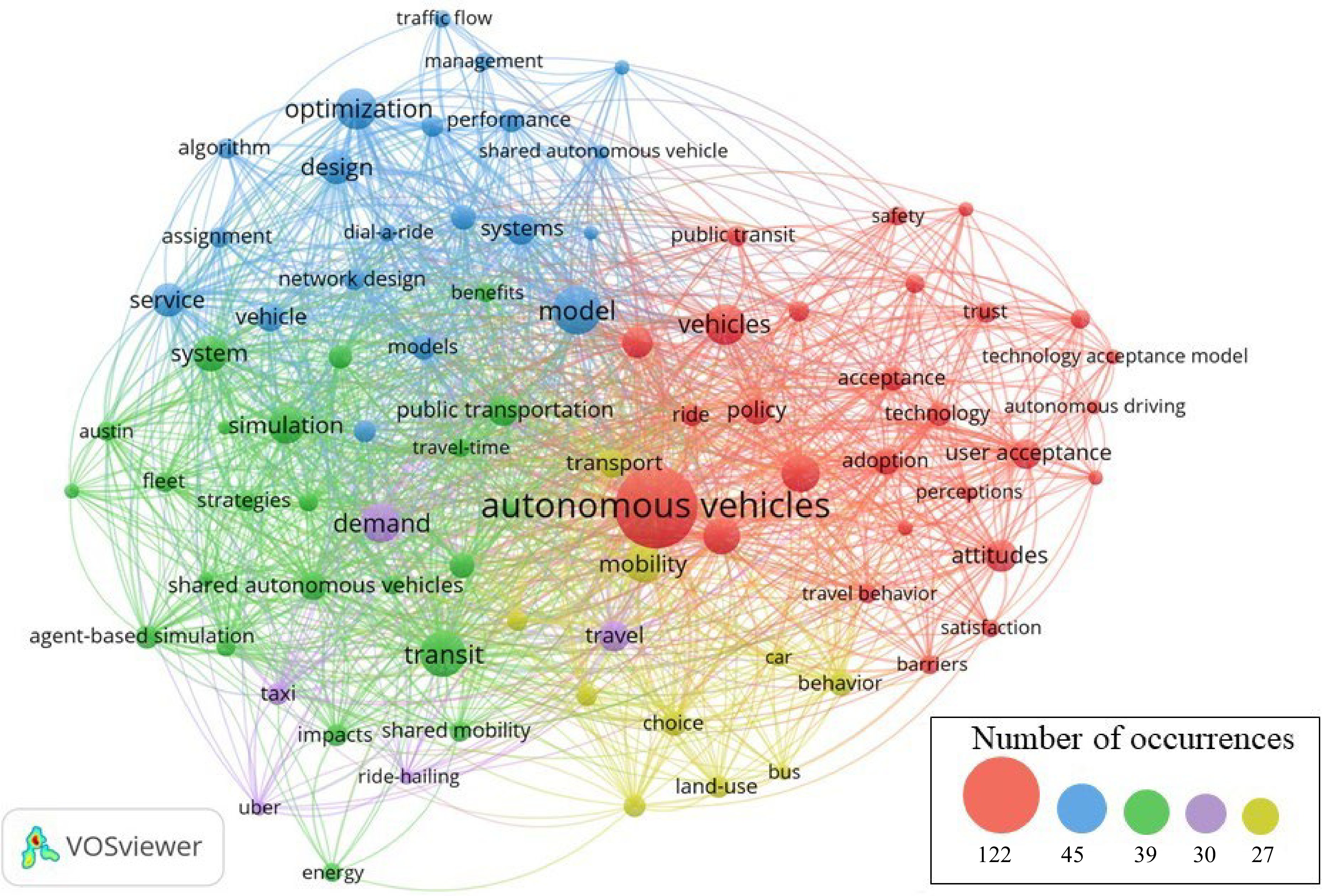
Figure 5.
Co-occurrence of keywords.
As shown in Fig. 5, the keywords related to autonomous bus services can be classified into five main categories: Cluster 1 (red) is primarily about users' attitudes, such as perception, safety, attitudes, concerns, and acceptance toward the service. Cluster 2 (blue) primarily focuses on optimization models, algorithms, and network designs for service systems. Cluster 3 (purple) pertains to the demand for the service and its effect on other services, such as taxis, Ubers, and ride hailing. Cluster 4 (green) primarily pertains to the bus fleet, travel time, and simulation model used in the system optimization analysis. Cluster 5 (yellow) focuses on the behavior of services, mobility, and the effect of land use. In the subsequent chapters, these aspects are systematically reviewed separately.
-
Owing to the numerous advantages of autonomous bus services, a pilot demonstration application was first conducted in Spain as a subproject of the CityMobil project in the EU's 6th Framework Program[16]. Subsequently, autonomous bus services were widely applied in more than a dozen countries and regions in the CityMobil2 project of the EU's 7th Framework Program. Alessandrini et al.[6] conducted a generic SP questionnaire in 12 European cities, where the program was implemented to discover the acceptance of travelers toward conventional and autonomous bus services. The findings indicated that if autonomous bus services cannot provide advantages in terms of trip time and pricing benefits compared with conventional bus services, then travelers will not perceive that they are valuable. From a safety perspective, travelers in these cities tend to be suspicious of automated transit services under mixed-traffic conditions. Herrenkind et al.[19] developed a model to analyze the acceptance of 268 German passengers toward autonomous bus services to demonstrate the advantages of the services. They discovered that a combination of personal factors, social effects, and system characteristics determined the passengers' acceptance. Based on an investigation regarding the usage of autonomous bus services in Greece, Papadima et al.[7] suggested that most residents are satisfied with the service and that price, not safety, is an essential factor in deciding whether to use the service. However, based on the findings of a survey conducted by Roche-Cerasi[14] among 1419 members of the Norwegian Automobile Federation, most individuals were concerned about the safety of autonomous bus services in mixed traffic flows and did not believe that the services offered significant advantages. Unfamiliarity with autonomous bus technology may be a primary factor affecting its acceptance by the general population. According to a field survey of 942 tourists in Germany before and after traveled on an autonomous minibus, Bernhard et al.[9] discovered that most of them were satisfied with the service and that the first-riding experience significantly affected their acceptance of the service.
Based on quantitative travel cost data in Japan, Abe[4] discussed the effect of autonomous bus services on metropolitan transportation systems and demonstrated their potential benefits in reducing passenger travel costs and improving transit accessibility. Sun et al.[12] conducted a survey regarding autonomous bus services in Singapore, which revealed increased service efficiency and decreased total cost of ownership. Moreover, passengers' choice of bus service is significantly determined by travel time and cost, with the latter imposing greater effect. Based on actual travel demand data for Fuyang City in Zhejiang Province, China, Zhai et al.[20] developed an agent-based simulation model to evaluate the effectiveness of autonomous bus services. The results showed that the service required less road space, demonstrated more effective use of bus vehicles, adapted to changes in bus travel demand, and was financially viable. A performance assessment of fixed-route and door-to-door feeder bus services, conducted by Badia & Jenelius[21], revealed that autonomous buses significantly affected service strategies under various technological development scenarios. When autonomous bus technology is sufficiently mature, it can significantly expand the applicability of door-to-door transit services. Using business data before, during, and after the operation of an autonomous bus service in Las Vegas, Kim et al.[11] discovered that employment, education level, and residential employment opportunities significantly affected the preference toward the service and that the service can increase business activity in older, declining downtown areas.
Salonen[13] performed a study on 197 autonomous bus passengers in the Netherlands and showed that the driving safety of autonomous buses was higher than that of regular buses, although passengers felt much less safe inside the vehicles. An analysis of 891 respondents in Philadelphia, USA by Dong et al.[22] revealed that when an employee was on board to oversee the operation or aid, most respondents were willing to ride self-driving buses; otherwise, only 13% indicated willingness. Kassens-Noor et al.[15] surveyed people in Michigan (USA) and discovered that autonomous bus services may attract more travelers. However, approximately one-half of the respondents mentioned they were unsure of reusing the service because they were concerned about safety and did not trust driverless technology. Based on a survey of 1062 respondents in Spain conducted by Rosell & Allen[8], passengers with higher socioeconomic status were more satisfied with autonomous bus services and more willing to reuse them, whereas women were less inclined to ride autonomous buses without employees.
Weschke et al.[23] conducted a Wizard-of-Oz experiment to determine the likelihood of passengers accepting autonomous bus services. They discovered that the services improved feeder trips, whereas travelers wished to be the only ones on the bus and would rather seek services in real time than reserve ahead of travel. Mouratidis & Cobeña Serrano[24] utilized a mixed methodology comprising surveys and interviews to analyze the feedback of passengers before and after they traveled on an autonomous bus and whether they intended to use the service in the future. The findings indicated that most passengers were satisfied with the service and preferred more frequent departures, more rapid vehicle speeds, less abrupt braking, and the presence of employees in the vehicle. An analysis of survey data from Lincoln City in the United States by Piatkowski[25] revealed that autonomous bus services complemented the current bus service system and that the riders' willingness to use the services depended on their age, whether they worked downtown, and their opinion regarding the service. Guo et al.[26] developed a mixed-logit model based on stated-choice experiments in Sweden to determine how passengers select between autonomous and conventional bus services. The findings indicated no significant difference in the selection behavior of these two services under normal conditions; however, the passengers were unwilling to select the autonomous bus service owing to its quality and dependability under unsatisfactory weather conditions. By performing structural equation modeling, Yan et al.[10] analyzed 576 Chinese passengers with experience riding autonomous buses. Empirical research indicates that the presence of a driver, in-vehicle safety, service quality, and good attitude toward the bus positively affect service reuse, whereas road safety does not impose any direct effect. Utilizing survey data from three different time points, Zhao et al.[27] investigated the dynamic characteristics of passenger acceptance toward an automated bus service over time. They discovered that service comfort, frequency, and travel time were crucial in determining whether passengers would continue to use the service. Guo et al.[28] performed structural equation modeling to investigate the acceptance of Stockholm residents toward autonomous bus services on public roadways in a mixed-traffic environment. The findings indicated that the adoption of this service was primarily determined by travel demands and user requirements instead of individual behavioral intentions. The literature related to users' attitudes is summarized in Table 3.
Table 3. Summary of literature related to users' attitudes.
Category Representative studies Data source Analysis approach Acceptance Alessandrini et al. (2016)[6] Questionnaire interview Copula-based logit Herrenkind et al.(2019)[19] Online questionnaire Structural equation model Roche-Cerasi (2019)[14] Questionnaire interview Descriptive statistics Papadima et al. (2020)[7] Online questionnaire Conjoint analysis Bernhard et al. (2020)[9] Questionnaire interview Descriptive statistics Performance Abe (2019)[4] National trip survey in Japan Descriptive statistics Sun et al. (2020)[12] Questionnaire interview Mixed logit Zhai et al. (2020)[20] Travel demand from Zhejiang Agent-based simulation Badia and Jenelius (2021)[21] Virtual operation data Continuum approximation Kim et al. (2022)[11] 3-year business license data Generalized linear mixed-effect regression Perception Salonen (2018)[13] Questionnaire interview Descriptive statistics Dong et al. (2019)[22] Online questionnaire Mixed logit Kassens-Noor et al. (2020)[15] Questionnaire interview Logistic regression Rosell and Allen (2020)[8] Questionnaire interview Structural equation model Preference Weschke et al. (2021)[23] Questionnaire interview Mixed logit model Mouratidis and Serrano (2021)[24] Questionnaire interview Descriptive statistics Piatkowski (2021)[25] Questionnaire interview Ordered logistic regression Guo et al. (2021)[26] Questionnaire interview Mixed logit model Yan et al. (2022)[10] Questionnaire interview Structural equation model Zhao et al. (2022)[27] Questionnaire interview Structural equation model Guo et al. (2022)[28] Questionnaire interview Structural equation model Review of literature related to operations
-
Considering that cities are increasingly deploying autonomous buses in their existing bus service networks, scholars have developed numerous optimization models and solution algorithms to assist authorities in devising optimal operational strategies. Cao et al.[29] developed a multi-objective model while considering schedule deviations, travel time, and energy consumption, which was solved using a multi-criteria decision analysis method based on spatiotemporal graphics techniques. Using optimal hold and speed-changing control strategies, they created autonomous bus schedules with no changes. Considering the requirements of both users and operators, Cao & Avi Ceder[30] devised the skip-stop strategy-based strategy for simultaneously optimizing the service timetable and vehicle schedule of autonomous bus services. Using the defect function graph and considering the constraints on vehicle capacity, they developed a multi-decision choice model and solved it via binary-variable iteration. The results indicated that the skip-stop strategy based on real-time passenger demand reduced the travel time and number of vehicles. Considering autonomous buses as sublines, Gkiotsalitis et al.[31] constructed a mixed-integer planning model to investigate the frequency optimization issue to minimize operation and passenger waiting times. Using the autonomous bus models in the VISSIM simulation platform, Zhang et al.[32] performed case studies to compare the reductions in emissions and energy use for managed and dedicated bus lane strategies. To combine the optimized routes and charging schedules of autonomous buses, Wang et al.[33] developed a constraint programming model with Boolean satisfiability conditions and evaluated the best routes and charger allocation schemes under various constraint scenarios. Zhang et al.[34] constructed a mixed-integer linear program to investigate the lane deployment issues for three travel modes (connected and autonomous buses, connected and autonomous passenger vehicles, and human-driven passenger vehicles) in a transportation network. They insisted that deploying dedicated lanes for autonomous buses would significantly increase the number of passengers and the total benefits to society. Hatzenbühler et al.[35] designed a multi-objective optimization and multi-agent simulation framework to investigate the network design of autonomous bus services under two strategies, i.e., user-centric and operator-centric strategies, to achieve a higher potential travel demand.
Although the application of autonomous buses on a large scale offers considerable benefits, it cannot be accomplished immediately because of financial constraints and uncertainties in the evolution of driverless technology. Based on fluctuations in passenger demand, Dai et al.[36] constructed an integer nonlinear programming model to jointly optimize the capacity and scheduling of systems with autonomous and conventional buses. The bus capacity was varied by assembling or disassembling multiple autonomous minibuses and adjusting the operating time based on forward and backward headways to simultaneously reduce operational and passenger costs. To determine the best fleet size for autonomous buses and distribute vehicles across multiple bus lines, Tian et al.[37] constructed a mixed-integer stochastic programming model reformulated using a quadratic transform with a linear alternating algorithm. Hatzenbühler et al.[38] performed a dynamic transit allocation and developed an operation simulation model to investigate the effect of service frequency and vehicle capacity on the sequential deployment of autonomous buses in a line. Considering passenger acceptability, Tian et al.[39] established a mixed-integer nonlinear model to minimize trip costs to optimize the deployment of autonomous buses on bus lines at various phases. Zhang et al.[40] constructed a generalized operational cost model that accounted for the effects of passenger wait time, ride time, operating cost, and capital cost under various scenarios to determine the parameters that affect the service efficiency provided by autonomous buses.
Recently, owing to advancements in information, communication, and vehicle-road collaboration technologies, several scholars have developed innovative service models using modular autonomous buses. By applying an enhanced deficit function theory, Liu et al.[41] devised a technique to precisely estimate the minimal size of modular autonomous buses required to satisfy the actual demand for public transit trips. Wu et al.[42] proposed a modular autonomous bus system with dynamic transfer strategies to satisfy time-fluctuating traffic demands and constructed a two-stage model to optimize the design of passenger transfer plans and vehicle travel trajectories. Dakic et al.[43] investigated a modular autonomous bus unit combination and scheduling optimization issues based on a three-dimensional macroscopic fundamental diagram to minimize the overall cost of the service system. Based on passenger demand at different periods, Tian et al.[44] constructed a mixed-integer nonlinear program to investigate the optimization of modular autonomous bus stop locations, stop capacities, and vehicle formations, thus demonstrating the benefits of the service in reducing the total cost to operators and passengers. The literature related to operations is summarized in Table 4.
Table 4. Summary of literature related to operations.
Vehicle category Operation Objectives Solution approach Representative studies Autonomous bus Timetable Time-space graphical techniques Cao et al. (2019)[29] Timetable and vehicle schedule GA combined with binary variable iteration Cao & Ceder (2019)[30] Timetable Mixed-integer linear program Gkiotsalitis et al. (2022)[31] Emission and energy Simulation model Zhang et al. (2020)[32] Route and recharge
scheduleConstrained program Wang et al. (2021)[33] Dedicated lanes Mixed-integer nonlinear program Zhang et al. (2022)[34] Network Multi-objective optimization Hatzenbühler et al. (2022)[35] Autonomous and
conventional busSchedule and capacity Mixed-integer nonlinear program Dai et al. (2020)[36] Fleet Mixed-integer stochastic program Tian et al. (2021)[37] Deployment Dynamic assignment and simulation model Hatzenbühler et al. (2020)[38] Deployment Bi-level optimization Tian et al. (2022)[39] Semi- and fully-
autonomous busGeneralized cost Mixed-integer nonlinear program Zhang et al. (2019)[40] Modular autonomous bus Fleet Graphical method Liu et al. (2020)[41] Transfer Two-stage model Wu et al. (2021)[42] Vehicle schedule Three-dimensional macroscopic fundamental diagram Dakic et al. (2021)[43] Station location Mixed-integer nonlinear program Tian et al. (2022)[44] -
Studies regarding users' attitudes related to autonomous bus services focus on four primary categories: acceptance, performance, perception, and preferences. Most of the data in these studies was primarily derived from questionnaires, which can be obtained via interviews or online surveys. Only a few studies utilized data derived from travel demands or operational information. Descriptive statistics were the most commonly used method to analyze the data. To quantitatively resolve the potential effects of various factors, some researchers used structural equations and mixed logit models for their analyses. Additionally, researchers developed copula-based logit models to determine the relationship between certain factors.
Acceptance-related studies
-
Evaluating the adoption of autonomous bus services among various passengers can provide authorities with adequate prior knowledge for developing effective management strategies. However, studies regarding the acceptance of autonomous bus services yielded inconsistent results. This may be because the questionnaire design, respondent selection, and survey process varied across case areas. Therefore, a critical direction for future research is to obtain robust and unbiased analytical conclusions by designing more comprehensive questionnaires, selecting more representative respondents, and implementing more standardized survey processes. Moreover, based on behavioral theory, the relationship between passenger perceptions and behavioral intentions can evolve over time. In future research, comprehensive longitudinal studies should be conducted to determine whether specific policies substantially affect travelers' acceptance of this unique service mode.
Performance-related studies
-
Implementing autonomous bus services presents an essential opportunity for authorities to develop more efficient and inclusive transit services. In low-density travel demand areas, autonomous bus services can further enhance the efficacy of flexible services while substantially decreasing operational costs. However, the current performance evaluation of autonomous bus services focuses on cases in specific social contexts, thus inducing substantial divergence in evaluation metrics and rendering it challenging to obtain generally accepted conclusions. Therefore, a potential improvement trend is to identify comprehensive and standardized metrics, including personal characteristics, social effect, time value, space value, and service quality, as well as to construct more advanced hybrid analytical models to provide comparable evaluation outcomes. Moreover, few studies have assessed the implementation of autonomous bus services under various subsidy policy scenarios. Another issue that requires further study is the method to achieve synergy between autonomous bus services and arterial high-capacity transit services in high-density travel demand areas.
Perception-related studies
-
The perception of autonomous bus services can aid authorities in developing and implementing targeted management strategies. However, as passengers become more experienced with the service, their perceptions may change, rendering the previous outcomes impractical. Therefore, the temporal stability of service perceptions must be investigated comprehensively to support transit agencies in dynamically adjusting management policies in response to passengers' attitudes. Moreover, the findings revealed substantial variations in the parameters affecting passenger perceptions of the quality of automated bus services across regions. This suggests that further investigations regarding the complicated relationships among service characteristics, traveler attributes, service perceptions, travel demand, and behavioral choices are required to provide a theoretical foundation for establishing targeted management strategies.
Preference-related studies
-
Most passengers desire autonomous buses to enhance travel efficiency and service comfort. Thus, further advances in automation technology are required to enable higher travel speeds and prevent unexpected abrupt braking without sacrificing safety. Moreover, contradictory outcomes have been reported from various studies about service preferences. For instance, some scholars insisted that most respondents were eager to select the service, whereas other case studies in Northern Europe showed that passengers exhibited a negative attitude toward it. This contradiction may be due to the varying demands of passengers in each region and the culture for bus services or because these studies were conducted during different periods. In the prior survey, respondents might not be familiar with autonomous technology and thus were less inclined to accept the service. However, in more recent studies, the respondents were the most cognizant of the service and preferred to select it. In future studies, the service's long-term effects on passenger preferences and their heterogeneity across different regions and social environments should be investigated.
Operation-related research
-
Various mathematical models have been developed to determine the optimal operational strategy for autonomous bus service systems. The findings primarily focused on timetables, fleets, vehicle scheduling, and bus networks.
Timetable optimization studies
-
In general, autonomous buses can generate timetables based on real-time travel demands. Thus, the flexibility of autonomous bus services might mitigate the effect of fluctuating uncertainty in travel demand, thus offering passengers dependable, efficient, and attractive services and consequently decreasing the overall operating costs. The combined optimization of timetables and vehicle scheduling for autonomous buses can further reduce the resources of users and operators. However, the collaborative optimization of autonomous bus service networks and timetables is generally a multi-objective issue that should account for the effects of multiple stakeholders concurrently. The intricacy of the issue renders it challenging to obtain globally optimal solutions for multiple goals within an acceptable computation time for large-scale road network scenarios. Thus, the quality of the solution relies significantly on the allowable calculation time and typically necessitates a trade-off between the issue size and the number of optimization parameters. Future studies should focus on enhancing various optimization algorithms and increasing computing efficiency to obtain comprehensive solutions.
Bus fleet optimization studies
-
Current studies regarding autonomous bus fleets generally assume that vehicle volumes are consistent. In the future, the capacity, speed, and cost implications of multiple vehicle types should be considered. Additionally, the study of autonomous bus services from a single bus line should be expanded to that of a network with multiple stops, i.e., where passenger flows interact between more than two bus lines; furthermore, a method to synchronize the services on different lines should be devised. Notably, findings from passenger surveys indicate that in-vehicle time, waiting time, travel time, and fares are significant factors that affect the demand for public transit travel. Therefore, to construct more detailed and realistic demand models and network structures, future studies should comprehensively consider the effect of time-varying travel demand on service optimization.
Vehicle scheduling studies
-
Owing to the uncertainty in vehicle acquisition costs and driverless technology, integrating autonomous bus services into existing public transit systems may require in-depth and systematic studies of large-scale schedule strategies. If the deployment of autonomous buses is required in a large-scale zone, then the replacement sequence of conventional buses with autonomous buses over a long-term horizon must be investigated. Scholars have proposed several optimization models to support authorities in deciding schedule options for autonomous bus services in existing transit networks. When more actual operational data becomes available, the schedule program for autonomous bus services can be determined by considering more detailed influencing factors, such as passenger attitudes, operating costs, ticket structures, and financial subsidies. Moreover, most previous studies have focused on the appropriate deployment strategy for autonomous bus services in existing bus networks, i.e., the effect of the service on costs was evaluated from both operational and travel aspects based on the identified travel demand. In future studies, the advantages of this service mode may be more fully demonstrated if the vehicle schedule is simultaneously re-optimized for the features of autonomous and conventional buses.
Bus networks studies
-
Based on recent studies, autonomous bus services can significantly reduce operational costs by eliminating driver expenses. Thus, even if the acquisition cost of a vehicle is considerable, the service exhibits significant potential to benefit both passengers and operators. Moreover, the service may enhance bus service quality by enabling authorities to dynamically modify timetables based on fluctuations in travel demand, thereby reducing the average passenger wait time at stops. However, owing to the commercial speed of driverless technology, a lengthy transition process is required before autonomous bus services can be realized. Thus, considering the significance of in-vehicle safety for passengers, authorities must evaluate the possibility of semi-autonomous bus services with employees in the vehicle until driverless technology is developed completely. Hence, we should focus on issues related to semi-autonomous bus services in the transition phase, e.g., replanning the bus network and implementing reasonable vehicle allocation and staff scheduling.
Novel modular autonomous bus operation
-
Modular autonomous buses provide a new perspective and high flexibility in bus scheduling systems, which allows the departure frequency and allocation of vehicle resources to be improved, thus decreasing the total operating costs. The service mode enables a dynamic capacity design, i.e., rapid and automatic assembly or disassembly into buses of specific capacities depending on the fluctuating passenger demand on various routes. Thus, it can further enhance the operational efficiency of the transit system and minimize operating costs by simultaneously optimizing vehicle capacity and scheduling timetables. Despite its numerous advantages, this service mode remains at the theoretical research stage. In the future, to achieve widespread promotion and application, substantial studies will be required in many operational scenarios, such as extreme weather environments, vehicle breakdown issues, and in-vehicle safety. Realizing the dynamic connectivity of vehicle dispatch across multiple routes is another issue. Based on assembly operations, modular vehicles driving on the same road can be formed into one high-capacity bus, thereby improving capacity utilization. Similarly, through disassembly operations, the bus may be classified into multiple modular vehicles based on the passenger's destination, thus eliminating numerous transfers between bus lines and enhancing service efficiency. However, considering the highly random boarding and alighting demands in time and space, the service for picking up and dropping off passengers is complex and challenging. In particular, for road sections with insufficient space or congested traffic flow, stopping according to the designated requests of all passengers may be impossible. Thus, based on passenger origin and destination information, future studies on the joint optimization of assembly or disassembly operations with intersection management control may provide additional advantages. Therefore, this innovative service mode must be investigated comprehensively before it can be extensively applied. Moreover, in the future, extending the service to more complex regional network scenarios and combining assembly/disassembly operations with more fine-grained operations management strategies (e.g., timetable, skip stops, bus holding, and dynamic routing) is essential.
-
In the past decade, owing to the rapid development of advanced technologies such as sensing, communication, intelligence, and computation, driverless technology has become increasingly mature; consequently, numerous pilot projects for autonomous bus services worldwide have been proposed. To fully comprehend the benefits and disadvantages of this new service mode and guide future development, we conducted a bibliometric analysis and systematic evaluation of 300 publications in various domains of the WoS database using knowledge mapping analytic methodologies. The conclusions inferred from this study are as follows.
(1) A summary of 300 documents revealed that autonomous bus services were first investigated in 2009, where a significant number of papers were published after 2014. These publications involved 842 authors, among whom Kockelman K. was the author of the most papers, and the most cited scholar was Shiftan Y.
(2) All papers were published in 80 journals, with the early studies focusing on the service were published in Transportation Research Record, Transportation Research Part C, and Transportation, whereas the more recent ones were published in Transportation Research Part E, Transportation Science, and the KSCE Journal of Civil Engineering. Moreover, studies regarding autonomous bus services can be classified into two groups, i.e., users' attitudes and operation optimization, based on an analysis of 1480 keywords from all documents.
(3) Acceptance, satisfaction, performance, perception, and preference were the five subfields in users' attitude-related studies. The data were obtained via questionnaires and analyzed using statistical techniques. The results of acceptance indicated that passengers anticipated autonomous bus services to deliver benefits in terms of journey time, cost, and safety under mixed traffic flow conditions. Although the performance evaluation findings of the autonomous bus service showed that the service can reduce travel costs and increase transit accessibility, contradictory outcomes were yielded regarding traveler preferences for the service. The most influential factors affecting passenger preferences were service quality (e.g., frequency of departures, riding comfort, and travel duration), in-vehicle safety, and dependability in inclement weather.
(4) For the operational optimization of autonomous bus services, scholars have primarily focused on timetables, fleets, vehicle scheduling, and bus networks. Owing to the flexibility of autonomous bus services, dynamically modifying the timetable based on real-time travel demands can provide passengers with attractive travel services. However, owing to the uncertainties in vehicle acquisition costs and driverless technology development, integrating the service into the existing transit system requires meticulous consideration of the deployment sequence and simultaneous optimization of the bus network. Notably, modular autonomous buses can be assembled or disassembled into buses of a specific capacity, depending on passenger boarding or alighting requirements, thus providing a new perspective for the further optimization of transit services.
The summary of the current findings pertaining to autonomous bus services from both users' attitudes and operational optimization aspects, as well as recommendations for future studies, are provided below:
(1) Various users' attitude-related case studies yielded contradictory conclusions. To obtain comparable findings, future studies should focus on developing standardized data acquisition techniques such as questionnaire design, respondent selection, and survey processes.
(2) Owing to the time-varying nature of the relationship between perceptions and behavioral intentions, more longitudinal studies are necessary to determine the effects of specific autonomous bus service policies on travelers in various phases. The effect of cultural and social environmental heterogeneity across regions should be evaluated in future studies.
(3) Future operations optimization studies should evaluate the effect of various vehicle capacities, speeds, and costs on fleet composition and the expansion of autonomous bus services from specific bus lines to networks based on fluctuating travel demands. Moreover, based on actual operational data, the deployment sequence and transit network must be optimized while simultaneously considering the characteristics of autonomous and conventional buses.
(4) Owing to the protracted nature of the transition from conventional to fully automated buses, future studies should focus on optimizing semi-autonomous bus services. Extensive studies are necessary to realize the widespread deployment of autonomous modular vehicles under various scenarios. In actual road network environments, assembly or disassembly strategies for modular autonomous buses must be integrated using different fine-grained operation optimization techniques.
Although the WoS database is an effective literature resource platform, from which we searched for all related papers to the best of our ability, some limitations are presented in the literature review. A few essential documents from other database platforms, such as Scopus, CNKI, and Wanfang Data, were not fully considered. This does not imply the triviality of these publications; instead, performing a bibliometric analysis of literature information from different databases using current knowledge graph analysis tools is challenging. Hence, by reviewing related research from multiple database platforms and considering the evaluation characteristics over stages, future research could provide more comprehensive information regarding current achievements and targeted recommendations for autonomous bus services.
-
The authors confirm contribution to the paper as follows: draft manuscript preparation: Shen J; analysis and interpretation of results: Liu Q; data collection: Ye Z, Jiang W; study conception and design: Ma C. All authors reviewed the results and approved the final version of the manuscript.
-
The data that support the findings of this study are available in the Web of Science (WoS) repository.
This research was supported by the Natural Science Foundation of China (No. 51808187, No. 52062027), the Key Research and Development Project of Gansu Province (No. 22YF7GA142), Soft Science Special Project of Gansu Basic Research PIan (No.22JR4ZA035), Gansu Provincial Science and Technology Major Special Project - Enterprise Innovation Consortium Project (No. 21ZD3GA002, No. 22ZD6GA010), Lanzhou Jiaotong University Basic Research Top Talents Training Program (No. 2022JC02).
-
The authors declare that they have no conflict of interest. Jinxing Shen and Changxi Ma are the Editorial Board members of Digital Transportation and Safety who were blinded from reviewing or making decisions on the manuscript. The article was subject to the journal's standard procedures, with peer-review handled independently of these Editorial Board members and their research groups.
- Copyright: © 2023 by the author(s). Published by Maximum Academic Press, Fayetteville, GA. This article is an open access article distributed under Creative Commons Attribution License (CC BY 4.0), visit https://creativecommons.org/licenses/by/4.0/.
-
About this article
Cite this article
Shen J, Liu Q, Ye Z, Jiang W, Ma C. 2023. Autonomous bus services: current research status and future recommendations. Digital Transportation and Safety 2(3):229−240 doi: 10.48130/DTS-2023-0019 

Autonomous bus services: current research status and future recommendations
- Received: 21 April 2023
- Accepted: 18 September 2023
- Published online: 28 September 2023
Abstract: Implementing autonomous bus services in several cities has garnered substantial research attention worldwide. However, the benefits and challenges of this emerging mode remain insufficiently understood. Consequently, VOSviewer was employed for a bibliometric analysis involving 300 publications, investigating the associations among authors, journals, and keywords. Subsequently, we comprehensively reviewed the current state of research on two topics and proposed future recommendations. Results indicate that the first document related to autonomous bus services was published in 2009. Most user attitude -related research data are obtained via questionnaires and analyzed using statistical techniques. Autonomous bus services are expected to benefit passengers regarding travel time, cost, safety, etc., while passenger preferences are inconsistent. However, integrating the service into existing bus systems requires careful consideration of the schedule sequences. Notably, modular autonomous bus services present a new opportunity for the further optimization of bus services. In future studies, standardized data acquisition procedures should be developed to achieve comparable results. Regarding traveler choice behavior, the effect of specific autonomous bus service policies over time and the heterogeneity due to cultural or social contexts across regions should be assessed. To further promote autonomous bus services, based on fluctuating travel demands, the effects of vehicle capacity, speed, and cost of fleet composition should be evaluated comprehensively to optimize the bus network and schedule sequence. Owing to the protracted nature of the transition from conventional to fully autonomous buses, one should prioritize semi-autonomous bus services. Another essential future research direction is to integrate modular autonomous bus assembly or disassembly strategies with different fine-grained operation optimization techniques in various scenarios.
-
Key words:
- Autonomous bus /
- Users' attitude /
- Operation /
- Bibliometric analysis /
- Systematic review /
- VOSviewer